M31 ist die uns am nächsten gelegene “große” Galaxie (d.h. abgesehen von Zwerggalaxien wie z.B. LMC).
M31 gehört zur sog. “lokalen Gruppe”.
M31 ist das klassische “Anfängerobjekt” für die Deep-Sky-Fotografie.
Edwin Hubble konnte 1933/1934 am Mount Wilson Observatorium M31 in teilweise einzelne Sterne auflösen und dabei auch sog. Delta-Cephei-Sterne finden. Die scheinbare Helligkeit des “H1” genannten Cepheiden in M31 schwankte zwischen 18,3 und 19,7 mag. Mit Hilfe der bekannten Periode-Leuchtkraft-Beziehung konnte er die absolute Helligkeit und damit die Entfernung von M31 bestimmen. Die Entfernungsbestimmung ergab seinerzeit zunächst knapp 1 Million Lichtjahre.
Bis damals war die allgemeine Überzeugung, dass es ausser unserer Galaxis, der “Milchstraße”, keine anderen Galaxien geben würde und die allerseits zu beobachtenden “Nebel” (wie M31) wohl zur Milchstraße gehören müssten.
Als Walter Baade Anfang der 1950er Jahre am gerade fertiggestellten 5m-Spiegel auf dem Mount Palomar zwei verschiedene Typen von Cepheiden nachweisen konnte (mit zwei verschiedenen Periode-Leuchtkraft-Beziehungen), musste die Entfernung auf 2,5 Mio Lichtjahre korrigiert werden.
Generelle Vorbereitungen für das Fotografieren von M31
Wann ist der günstigste Zeitpunkt; d.h. wann steht M31 schön hoch am Himmel?
In 2018 in Hamburg: 12. Oktober – 20. November (h>70°)
Dann brauchen wir noch eine günstige Mondphase z.B. Neumond und gutes Wetter. Als Neumond-Daten haben wir:
2018: 08. Okt.
2019: 27. Okt.
2020: 16. Okt.
2021: 4. Nov.
Als günstigen Standort für die Beobachtung habe ich Handeloh gewählt.
Mit welchen Einstellungen sollen die Fotos geschossen werden?
Geplante Belichtungszeit: 10 x 300 Sekunden bei ISO 800
Probefotos ergaben, dass bei dieser Belichtung das Histogramm der Einzelfotos “gut” aussah; d.h. deutlich vom linken Rand abgesetzt und von rechten Rand noch sehr weit entfernt
Im Jahre 2018 war ich mit meinen astrofotografischen Übungen dann so weit und konnte folgende Aufnahme gewinnen:
Abbildung 1: M31 in der Andromeda (pCloud: 20181014_Autosave_0239-0248_16_CI_RGB.jpg)
Die Bildbearbeitung (Post Processing)
Als all die schönen Bilder “im Kasten” waren ging es erst einmal nach Hause, wo dann in den nächsten Tagen, Wochen und Monaten die Bildbearbeitung begann.
Stacking mit Deep Sky Stacker. Dabei erwies sich eines der zehn Lights als verwackelt und wurde ausgeschieden. Zehn Darks wurden ebenfalls gemacht. Mit Deep Sky Stacker entstand dann das kalibrierte Summenbild im TIFF-Format.
Mit Regim erfolgte dann die Background Extraktion (auch Gradient Removal ganannt).
Weiterhin wurde mit Regim eine B-V-Farbkalibrierung vorgenommen.
Schließlich erfolgte mit Adobe Photoshop das Stretching durch “Tonwertkorrektur” und “Gradationskurven”.
Mit Noel Carboni’s Action Set “Astronomy Tools” in Photoshop wurden dann noch die Actions “Local Contrast Enhancedment”, “Increase Star Color” ausprobiert.
Zum Schluss wurde der sehr helle Kern von M31 noch mit “Bild -> Korrekturen -> Tiefen/Lichter” 10% dunkler gemacht.
Material zum Drucken das sog. Filament z.B. PLA-Pulver, PLA-Draht,…
Ein Computer-Modell des Gegenstands, der gedruckt werden soll (z.B. mit CAD-Programm)
Eingabedatei für den 3D-Drucker (aus dem 3D-Computermodell muss ein Slicing gemacht werden)
So einem 3D-Drucker muss man sagen welches Material er zum “Drucken” verwenden soll z.B. PLA-Pulver.
Eine Eingabedatei sagt dem 3D-Drucker dann genau, was er da “drucken” soll.
Computer-Modell als CAD
Zum Design eines Bauteils für den 3D-Drucker braucht man eine spezielle CAD-Software, mit der man das Bauteil in 3D interaktiv maßgerecht zeichnen kann und die das für 3D-Drucker erforderliche Datei-Format (z.B. STL) erzeugen kann.
Aus einem CAD-Computermodell wird das Objekt in feine Scheiben (slices) zerlegt, was dann zum Drucker geschickt werden kann (Am besten via Speicherkarte, da der Druckvorgang mehrere Stnden dauern kann).
Der Slicer muss dan genau wissen, was für einen 3D-Drucker wir haben.
Stand: 31.12.20212 (added: Full Well Capacity, Google Archiv)
Eine neue Kamera: ZWO ASI294MC Pro
Ich wollte nun (Jan. 2020) meine Astrofotografie auf eine neue Ebene heben und statt mit meiner DSLR Canon EOS 600D nun mit einer gekühlten Astro-Kamera arbeiten.
Da das in meinen Augen schon recht teuer wird, habe ich mich nach etwas Gebrauchtem umgesehen.
Anfang Januar 2020 wurde ich fündig auf forum.astronomie.de und habe mit eine ZWO ASI294MC Pro gegönnt.
Alternativ wird auch das Modell ASI533MC Pro angeboten.
Fakten zur ZWO ASI294MC Pro
Und das gehört zur ASI294MC Pro:
ASI294MC Pro (mit Anschlüssen: T2 = M42*0,75, 1,25″ und 2″)
Gekauft am 2. Januar 2020 für EURO 850,– gebraucht
Sensor: Sony 4/3″ CMOS Color Sensor IMX294CJK – “Back illuminated”
Pixelgröße: 4,63 µm – 4144 x 2822 Pixel – 4/3″ = 19,1 x 13,0 mm
ADC 14 Bit (ADC = Analog to Digital Converter)
Full Well Capacity:
63700e- bei Gain 0
ca. 20000e- bei Gain 100
ca. 6000e- bei Gain 200
ca. 2000e- bei Gain 300
Leistungsstarke Peltierkühlung bis 45 °C unter Umgebungstemperatur (dafür wird eine 12V Stromversorgung benötigt, die bis zu 3 Ampere zieht).
Heizmanschette…
Gehäusedurchmesser 78 mm
Back Focus: 6.5mm (from camera front)
Back Focus: 17.5mm (from front of 11mm reverse thread adapter)
Auf einem klassischen CMOS-Sensor ist die Schicht mit metallischen Schaltungen die “Vorderseite” und die Schicht mit den photoelektischen Dioden die “Rückseite”. Ganz vorne liegt eine Schicht mit den Microlinsen der Bayermatrix. Bei dieser klassischen Anordnung müssen die Photonen bevor sie auf die Photodioden treffen durch die metallische Schicht hindurch.
“Back illuminated” bedeutet nun, dass man Vorder- und Rückseite vertauscht. Dann können die Photonen ohne die störende metallische Schicht “gefiltert” zu werden direkt auf die Photodioden treffen. Das erhöht die Empfindlichkeit durch bessere QE, was für die Astrofotografie vorteilhaft ist.
Einstellungen bei der ASI294MC Pro
Bei so einer Astro-Kamera gibt es einige besondere Einstellungen, die man wenn man von der DSLR kommt, nicht sofort versteht:
Gain: Ist soetwas ähnliches wie ISO bei der DSLR – aber warum ist “Unity Gain” so etwas besonderes und evtl. auch erstrebenswert?
Offset: kann man irgendwo einstellen (wo?) und welche Einstellung sollte man wählen?
Treiber für die ASI294 und das Amp Glow
Der neueste ASCOM-Treiber Version 6.5.1 vom 20. Nov 2020 benötigt die ASCOM-Platform 6.5
Das bei der ASI294MC Pro deutlich vorhandene Amp Glow soll mit den neuen ASCOM-Treibern reduziert sein.
Der aktuelle Windows-Treiber “native” Version 3.0.0.11 released 11. Sept. 2020 zeigt jedenfalls immer (unverändert?) starkes Amp Glow.
Das Amp Glow ist bei der ASI294MC Pro immer noch sehr deutlich zu sehen. Das finde ich bei einer Kamera für Euro 1000,– völlig unmöglich.
Hier ein Dark aufgenommen mit APT und dem o.g. “native” Treiber bei Kühlung auf 0° C (bei Umgebungstemperatur 23°), Belichtungszeit 960 sec, Gain 120, Offset 30
Abbildung 1: AmpGlow auf einem Dark-Frame mit der ASI294MC Pro (pCloud: RGB_D_2020-12-09_17-39-54_Bin1x1_960s__0C_AmpGlow-01.jpg)
Anschlüsse der ASI294MC Pro
Die Kamera ASI294MC Pro mit ihrem Sensor ist ja das “Endstück” einer Optik. Sie muss “hinten” an ein Teleskop oder ein Foto-Objektiv “angeschraubt” werden.
Dabei ist der richtige Abstand vom Ende des Teleskops, der sog. Backfokus, sehr wichtig.
Anschluss der Kamera per Vixen-Schiene oder Arca-Swiss
Die Kamera ZWO ASI294MC Pro hat einen Gehäusedurchmesser von 78 mm.
Dafür gibt es spezielle Rohrschellen (auch Holder Ring, genannt), mit denen man die Kamera auf einer Vixen-Schiene, einer Arca-Swiss-Schnellkupplung oder auch einfach mit einer 1/4-Zoll-Fotoschraube auf einem Stativ oder einer Montierung befestigen kann.
Meine alternative Lösung ist der Adapter ZWO-FD-EOS, den ich bei Teleskop-Service gekauft habe (s.u.)
Um ein Foto-Objektiv an der Kamera zu befestigen, benötigt man einen Adapter mit kameraseitigem M42-Aussengewinde (das wird auch T2 genannt) und objektivseitig das was das Objektiv eben benötigt (z.B. Canon-Bajonet, M42-Innengewinde oder…). Wenn man zusätzlich zu so einem Adapter noch eine Filterschublade benötigt, wird es knapp mit dem Backfokus. Daher habe ich den Adapter zurückgegeben und gleich eine Filterschublade gekauft, die auch die Adapter-Funktion erfüllt und exakt den richtigen Backfokus bietet (Teleskop Service ZWO-FD-EOS).
Angeregt durch das Youtube-Video von Trevor Jones (AstroBackyard
) spielte ich damals auch mit dem Gedanken dazu eine ASIair zu kaufen; das habe ich aber später verworfen, weil es nur noch die viel teurere ASIair Pro (EUR 359,– statt EUR 199,–) gab, welche auch erst irgendwann in der Zukunft geliefert werden sollte. Aber ich habe mal begonnen mich mit Linux und INDI-Treibern auseinanderzusetzen. Für die ASI294MC Pro gibt es sowohl INDI-Treiber als auch ASCOM-Treiber.
Wenn man über INDI geht (primär: Linux), benutzt man als Software KStars mit dem eingebauten EKOS.
Ich hatte dann mal die kleine Linux-Kiste “StellarMate” ausprobiert, hatte da aber Probleme, sie über mein LAN/WLAN zu erreichen.
Deshalb: Kommando zurück: Steuerung ggf. remote über meine Windows-Computer.
Foto-Steuerung über APT (Windows)
Die bewährte Software APT funktioniert mit der neuen Kamera ASI294MC Pro genau so gut wie vorher mit der DSLR Canon EOS 600Da.
In APT muss man den Kameratyp einstellen: Im Reiter “Camera” macht man “Shift Click” auf den Connect-Button, damit man zu den Kamera-Einstellungen von APT kommt. Um die ZWO ASI294MC Pro zu verwenden, klickt man dort nicht auf “Canon” und auch nicht auf “Nikon”, sondern auf “CCD”. Im CCD-Drop-Down kann man dann auswählen:
ASCOM Camera
SBIG Camera
Altair Camera
INDI Camera
ZWO Camera
Wenn ich “ASCOM Camera” auswähle brauche/benutze ich also die ASCOM-Treiber meiner ASI294MC Pro. Ich wähle aber “ZWO Camera” damit APT ohne ASCOM direkt mit den “native” Treibern der ASI-Karera arbeitet – so geht es mit APT etwas besser (LiveView, Zoom,…)
Foto-Steuerung über SharpCap (Windows)
Alternativ kann ich zum Fotografieren mit der neuen Kamera ASI294MC Pro auch die Software ShapCap einsetzen.
Regim starten und in der Menüleiste “Preprocessing” anklicken. Dann im Drop-Down-Menü nochmals “Preprocessing” auswählen….
Eingabe für das Stacking sind:
LIght Frames (Format FIT oder RAW,…)
Dark Frames
Flat Frames
“Flat Darks” sagt Regim. DSS nennt das “Bias Frames”
Ausgabe beim Stacken ist:
Ergebnisdatei FIT
Save as: Ergebnisdatei 16 Bit TIFF
Background Extraction / Gradient Removal mit Regim
Wir haben nun das Stacking bereits durchgeführt und haben also eine sog. “Summendatei”.
Als nächsten Schritt glätten wie den Hintergrund d.h. “Background Extraction” bzw. “Gradient Removal”. Der übernächste Schritt behandelt dann die Farben.
Als Eingabe benötigen wir eine Summendatei, die noch nicht gestretched ist, sich also noch in linearem Zustant befidet. Am Besten im Format TIFF.
Dann rufen wir die Funktion Gradient Removal auf indem wir in der Regim-Menüleiste auf “Edit” klicken und dann im Drop-Down-Menü “Remove Gradient” auswählen.
Daraufhin escheint eine kleine Dialogbox (Titel Remove Gradient) mit den Schaltflächen “Generate”, “Execute” und “Exit”.
Bevor wir auf “Generate” klicken füllen wir die Eingabefelder:
Number of Samples: z.B. 21
Blur Radius: z.B. 11
Background: auto/Manuell
Wenn diese Eingabefelder gefüllt sind, können wir auf die Schaltfläche “Generate” klicken. Es werden dann etsprechend den Eingaben Messpunkte für den Hintergrund (Background) gesetzt.
Wenn die Messpunkte für den Hintergrund O.K. sind, können wir auf “Execute” klicken. Das dauert ein klein wenig und am Ende haben wir drei Fenster (Originalbild, Bild nur mit dem Hintergrund, Bild mit dem entfernten Hintergrund). Die Bilder sind noch linear; d.h. zum Betrachten müssen wir den rechten Regler ziehmlich weit aufdrehen.
Wir klicken nun auf die Schaltfläche “Exit” (sonst geht’s nicht weiter).
Wir können dann die nicht benötigten Fenster schießen und das Ergebnis als 16 Bit TIFF abspeichern.
Da Regim nicht so wahnsinnig stabil läuft, ist das Abspeichern eines solchen Zwischenergebnisses immer sehr zu empfehlen.
Farbkalibrierung mit Regim
Auf der Regim-Menüleiste klicken wir auf “Color” und in dem Dropdown-Menü dann auf “Automatic B-V Color Calibration” oder “Manual B-V Color Calibration”…
Die Idee ist, den Farb-Index (B-V-Index) eines oder mehrerer Sterne im Feld heranzuziehen für die Farbkalibrierung des Bildes.
Bei der “Automatic”-Variante ermittelt Regim zunächst per Plate Solving, welche Sterne im Bild vorhanden sind und kann dann zu den identifizierten Sternen die B-V-Indices aus einem Sternkatalog abrufen.
Diesen Blog-Artikel schreibe ich ausschließlich zu meiner persönlichen Dokumentation; quasi als mein elektronisches persönliches Notizbuch. Wenn es Andere nützlich finden, freue ich mich, übernehme aber keinerlei Garantie für die Richtigkeit bzw. die Fehlerfreiheit meiner Notizen. Insbesondere weise ich darauf hin, dass jeder, der diese meine Notizen nutzt, das auf eigene Gefahr tut. Wenn Produkteigenschaften beschrieben werden, sind dies ausschließlich meine persönlichen Erfahrungen als Laie mit dem einen Gerät, welches ich bekommen habe.
Astronomie-Software KStars – was ist das?
KStars ist eine Astronomie-Software, die einerseits als schönes Planetarium-Programm fungiert, andererseits die astronomischen Geräte (Montierung, Kameras, …) steuern kann und dabei diverse nützliche Zusatz-Funktionen hat, wie beispielsweise
KStars gibt es für verschiedene Betriebssysteme (Plattformen): Android, Windows, Linux, MacOS
Download bei: https://edu.kde.org/kstars/
Die aktuelle Version (2024) ist: 3.7.5
Installation unter Windows
Download: https://edu.kde.org/kstars/
Allerdings gibt es einen “lokalen” INDI-Server unter Windows, das geht also nur mit einem zweiten Rechner z.B. Remote oder auch als Virtuelle Maschine.
Installation unter Linux – Ubuntu
Wenn wir KStars auf unserem Linux Ubuntu installieren, können wir leicht mit Ekos kontrollieren, ob der INDI-Server dort auch läuft.
Zur Installation geben wir im Terminal-Fenster ein:
sudo apt-add-repository ppa:mutlaqja/ppa
sudo apt-get update
sudo apt-get install kstars-bleeding
Die Applikation "KStars" findet man danach unter: Menüleiste -> Applications -> Education -> KStars
Rechte Maustaste: Add this launcher to desktop
Erste Schritte mit KStars
Als Erstes soll man bei KStars den Standort einrichten.
Die Sprache von KStars ist manchmal komisch bis gewöhnungsbedürftig. Beispielsweise gibt es in der deutsche Version so etwas wie “STF” auf das ich mir so überhaupt keinen Reim machen konnte. Im Englischen heisst das “FoV” – aha: “Field of View”, also “Gesichtsfeld”- aber KStars denkt “Sichtfeld”. abgekürzt “STF”.
Wie schalten wir die Sprachen bei KStars um?????
Große Frage – nicht bei den KStars-Einstellungen, sondern im Menü “Help -> Switch Application Language”
Menüleiste Extras: Rechner, Himmelskalender, Sonnensystem, Was ist los heute
Erste Schritte mit Ekos
Eine wesentliche Funktion von KStars auf dem Windows-Computer ist ja, das Modul “Ekos” aufzurufen und damit das Astro-Equipment zu steuern. Der Aufruf geschieht in der KStars-Menüleiste: Extras -> Ekos (englisch: Tools -> Ekos) oder über die Symbolleiste (Ecos-Symbol = Observatoriumsbild)
Das setzt voraus, das wir unsere Astro-Geräte mit einem INDI-Server verbunden haben. Der INDI-Server kann auch remote auf einem anderen Computer laufen z.B. einem Raspberry Pi mit Linux.
Ekos Profile
In Ekos haben wir dann sog. Profile, in denen der INDI-Server und die darüber die angeschlossenen Astro-Geräte zugeordnet werden.
Wir starten also Ekos und wählen ein Profil aus, starten Ekos/INDI und klicken dann auf “Connect”
Wenn ich KStars (incl. Ekos) auf einem Linux-Rechner installiere bekomme ich automatisch einen lokalen INDI-Server mit installiert. Da kann ich also “localhost” als Namen meines INDI-Servers angeben.
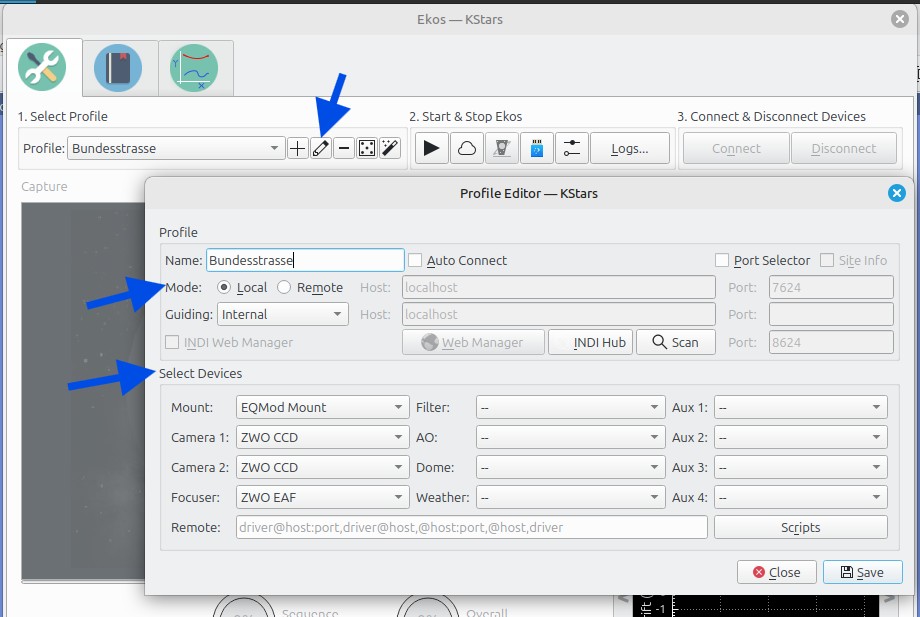
Ekos Profil: Astrogeräte über INDI
Alle unsere Astro-INDI-Geräte werden nun in das Profil eingetragen.
Editieren (Bleistift-Symbol) kann man das Profil nur, wenn die INDI-Geräte “Disconnected” sind und der INDI-Server gestoppt wurde.
Bevor die einzelnen Astro-Geräte in das profil eingetragen werden, muss man noch den “Mode” (Local oder Remote) angeben – das bezieht sich auf den INDI-Server. Danach muss man noch das Guiding angeben. “Internal” reicht.
N.I.N.A. ist eine Software für die Astrofotografie (ähnlich wie das etwas ältere APT). Das Konzept von N.I.N.A. ist möglicht viel (möglich alles) was der Astro-Foto-Mensch braucht unter einer einheitlichen und modern aussehenden Oberfläche anzubieten.
Da N.I.N.A. – ähnlich wie APT – sehr viel kann, ist es für den Anfänger nicht so leicht, sich da zurechtzufinden…
Als Vorteile von N.I.N.A. könnte man sehen:
N.I.N.A. ist Open Source Software
Mit N.I.N.A. kann man sich quasi ein Cockpit für die Astrofotografie individuell konfigurieren (Imaging mit mehreren Panels und Reitern).
Mit N.I.N.A. kann man separat Ziele (Targets) beschreiben und diese später in Sequenzen (aka APT Plan) einbauen. So ein “Target” kann dann manuell oder auch automatisch fotografiert werden.
Mit N.I.N.A. Plugins kann man viele spezielle Erweiterungen integrieren.
Die vielen Funktionen realisiert N.I.N.A. auf verschiedenen Wegen:
N.I.N.A. selbst hat “eingebaute” Funktionen (z.B. Kamerasteuerung, Montierungssteuerung, Sequencer,…)
N.I.N.A. hat Schnittstellen zu externer Software (z.B. Platesolving, Autoguiding, Planetariumsprogramm,…)
Für N.I.N.A. gibt es sog. Plugins ( z.B. Three Point Polar Alignment,…)
Da N.I.N.A. so fürchterlich viel kann, probiere ich Schritt für Schritt Teil-Funktionen aus, zu denen ich dann themenbezogene Einzel-Artikel geschrieben habe:
N.I.N.A. eine neue Software für die Astrofotografie
N.I.N.A. ist eine sog. Sequencing-Software; d.h. für die Astrofotografie können damit Sequenzen von Aktionen programmiert werden. Solche “Aktionen” können beispielsweise sein: Mache ein Foto, wechsele den Filter, mache ein Plate Solving, warte bis 3 Uhr morgens, bewege dich auf ein Target, mache ein Autofocussing u.v.a.m.
N.I.N.A. steht für “Nighttime Imaging ‘n’ Astronomy”
N.I.N.A. läuft unter Windows und ist kostenlos.
N.I.N.A. verbindet sich mit den Geräten über ASCOM oder per Native Driver.
Der “Default folder for sequence files” (unter Options -> Imaging -> Sequence)
Das ausgewählte Planetariums-Programm (Stellarium, Cartes du Ciel,…) (unter Options -> Equipment)
…
Die “Profiles” von N.I.N.A. werden in einem speziellen Ordner gespeichert.
In meinem Fall ist das der Pfad: c:\users\<name>\AppData\Local\NINA\profiles
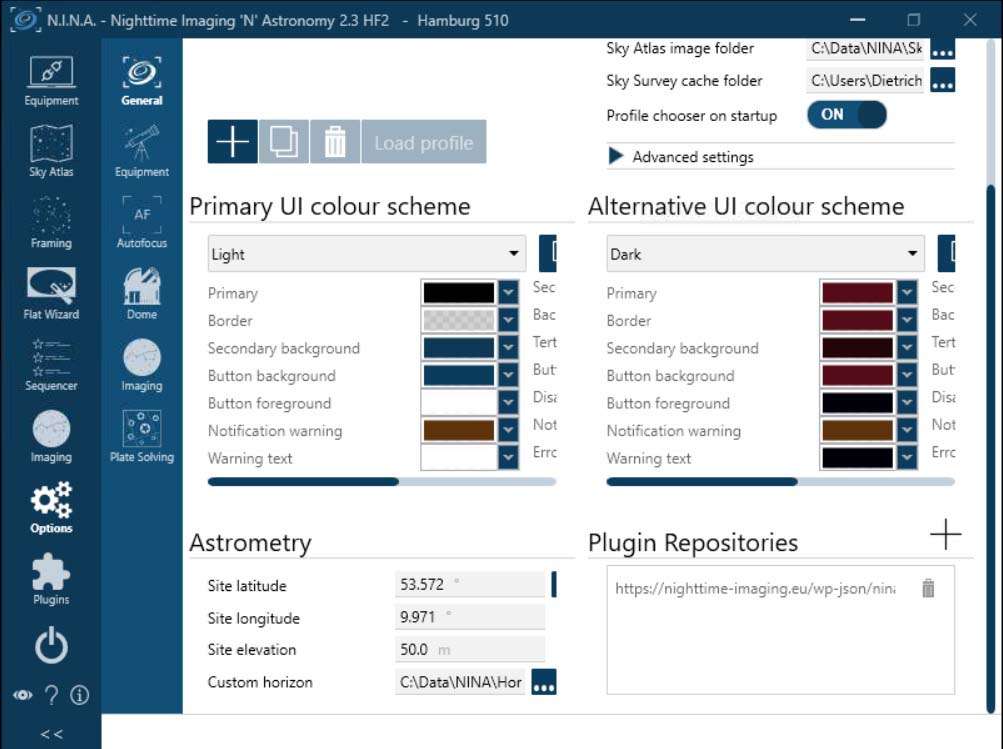
Standorte und Horizont
Jedes N.I.N.A.-Profil bekommt einen Standort mit seinen geografischen Koordinaten. Das macht man unter Options -> General -> Astrometry.
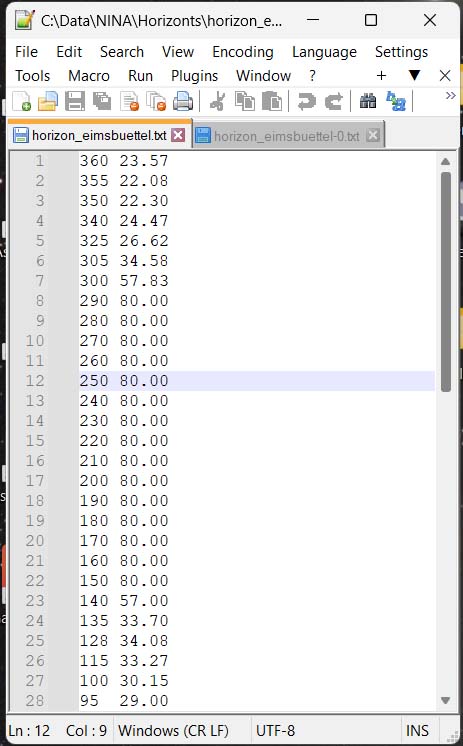
Der an diesem Ort zu beachtende Horizont kann in der besonderen Horizont-Datei definiert werden, die wir in N.I.N.A. unter “Options -> General -> Astrometry -> Custom Horizon” angeben.
Diese Horizont-Datei ist eine Text-Datei mit folgendem sehr einfachen Aufbau mit Azimut und Altitute Paaren:
Abbildung 2: Beispiel einer Horizont-Datei (pCloud: NINA_Horizon-3.jpg.)
Was bewirkt so ein “custom horizon”?
Wenn wir so einen “custom horizon” eingestellt haben, gibt es zwei Effekte:
In den Sichtbarkeits-Diagrammen wird dieser “custom horizon” zusätzlich angezeigt (z.B. Sky Atlas)
Im Advanced Sequencer kann man auf diesen “custom horizon” Bezug nehmen z.B. “wait until above horizon”
Image File Path
Unter Options -> Imaging wird der File Path eingestellt (und auch der Path für “Targets” und “Templates”)
Image File Pattern
Unter Options -> Imaging wird eingestellt, aus welchen Teilen sich der Dateiname zusammenstzen soll
Planetariums-Programm
Unter Options -> Equipment wird auch das Planetariumsprogramm eingestellt.
Bei “Cartes du Ciel” als Planetariumsprogramm stelle ich in N.I.N.A. ein: Host “localhost” und Port “3292”.
Bei “Stellarium” als Planetariumsprogramm stelle ich in N.I.N.A. ein: Host “localhost” und Port “8090”.
Das Planetariumsprogramm wird lediglich dafür verwendet, um ein Target (also ein Beobachtungsobjekt mit die Rektaszension und Deklination) auszuwählen und an N.I.N.A. weiterzugeben.
Das Planetariumsprogramm (Cartes du Ciel oder Stellarium) wird nicht zur Telekopsteuerung (also nicht zum Goto) verwendet und muss also auch nicht mit dem Teleskop verbunden werden. Die Teleskopsteuerung wird von N.I.N.A. selbst durchgeführt (also Slew to Target, siehe unten: Einzel-Funktion Slew) auf Grund der von Planetariumsprogramm übernommenen Ziel-Koordinaten.
Das Planetariumsprogramm ist für N.I.N.A. so eine Art “Server” und muss natürlich gestartet werden bevor N.I.N.A. aufgerufen wird. Auch sind im jeweiligen Planetariumsprogramm (Cartes du Ciel oder Stellarium) einige Einstellungen erforderlich damit sie als “Server” funktionieren.
Diesen Ordner entpacken und in N.I.N.A. im Tab Options->General einstellen bei “Sky Atlas Image Folder”: C:\Program Files\N.I.N.A. – Nighttime Imaging ‘N’ Astronomy\SkyAtlasImageRepository
Dann kann man den Tab “Sky Atlas” benutzen, um Targets auszusuchen und den Bildausschnitt einzustellen….
Plate Solving
Unter Options -> Plate Solving stellt man ein, welcher externe Platesolver von N.I.N.A. benutzt werden soll.
Wichtig für das Plate Solving sind auch die Einstellungen für “Pixel Size” und “Focal Length” (s.u.)
Beschreibung siehe: Plate Solving mit N.I.N.A.
Camera Pixel Size
Meine Kamera ZWO ASI294MC Pro hat eine Pixel Size von 4.63 µm.
In N.I.N.A. stelle ich das unter Options -> Equipment -> Camera ein.
Telescope focal length
Die Brennweite (focal length) der verwendeten Optik stelle ich in N.I.N.A. ein bei: Options -> Equipment -> Telescope
Auto Guiding (Verbindung)
Unter Equipment -> Guider stellt man eine Verbindung zu einer externen Software her, die von N.I.N.A. zum Auto Guiding benutzt werden soll.
Wenn ich da mit “PHD2 Guiding” verbinde, wird das automatisch aufgerufen mit dem aktuellen PHD2-Profil; d.h. die im PHD2-Profil genannten Geräte müssen dann auch schon verbunden sein.
Layouts von N.I.N.A.
Die Layouts von N.I.N.A. werden im gleichen Ordner wie die “Profiles” (s.o.).
In meinem Fall ist das der Pfad: c:\users\<name>\AppData\Local\NINA\profiles
Für das gecustomizte Layout des Fenstes “Imaging” legt N.I.N.A. zu jeder Profile-Datei noch eine Layout-Datei mit dem Namensbestandtteil “dock” dort an.
Benutzeroberfläche: Linke vertikale Leiste
Wenn N.I.N.A. gestatet wird (Profile ignorieren) erscheint ganz links im Bild eine vertikale Leiste mit folgenden Tabs:
Equipment
Sky Atlas
Framing
Flat Wizzard
Sequencer
Imaging
Options
Plugins (neu seit N.I.N.A.-Version 2.00)
Zu den fett ausgezeichnenten Tabs (Equipment, Imaging, Options) habe ich weiter unten Einzelheiten beschrieben.
Equipment Tab: Verbindungen
Zuerst wollen wir unsere Geräte verbinden, das geht mit dem Equipment Tab.
Wenn wir den Equipment-Tab klicken, erscheit eine zweite vertikale Leiste mit folgenden Symbolen:
Diesen Ordner entpacken und in N.I.N.A. im Tab Options->General einstellen bei “Sky Atlas Image Folder”: C:\Program Files\N.I.N.A. – Nighttime Imaging ‘N’ Astronomy\SkyAtlasImageRepository
Danach kann die Funktion benutzt werden; d.h. ich kann Beobachtungsobjekte in einem ausgewählten Sky Atlas suchen und bekomme dann Name, Himmelskoordinaten, Sichtbarkeits-Diagramm etc. des im Sky Atlas gefundenen Objekts angezeigt.
Mit so einem Objekt kann ich dann direkt in den Sequencer gehen oder erst einmal in den Framing Assistenten.
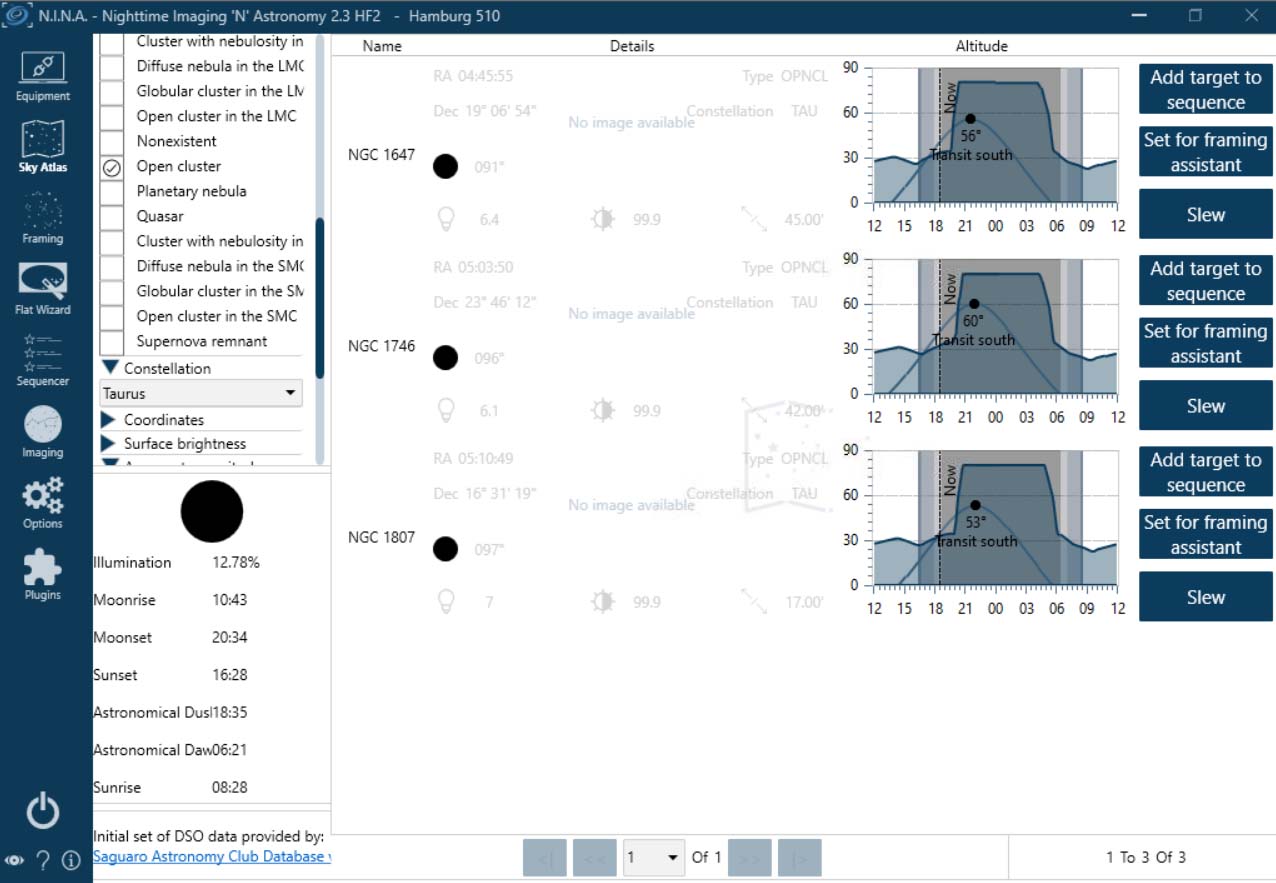
Abbildung 3: Sichtbarkeits-Diagramm mit Horizont (pCloud: NINA_Horizon-2.jpg)
In den Sichtbarkeits-Diagrammen sieht man standadmäsig die nautische und die astronomische Dämmerung, sowie die astronomische Nacht.
Wenn wir einen “Custom Horizon” definiert haben, wir dieser zusätzlich angezeigt.
Framing Tab
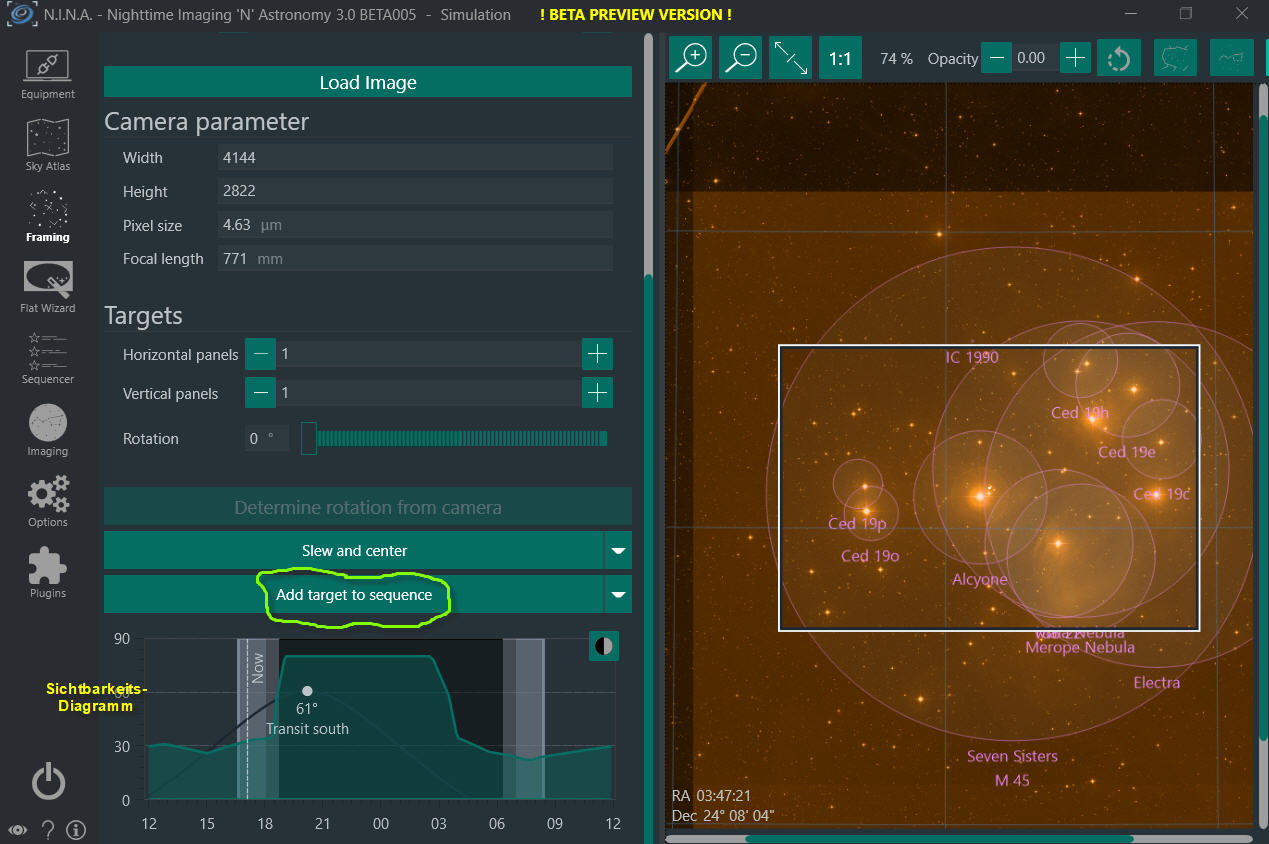
Im Framing Tab kann ich für ein ausgewähltes Beobachtungsobjekt den gewünschten Bildausschnitt (“Frame”) genau einstellen. Dazu gehört ausser den Himmelkoordinaten der Bildmitte u.U. auch der Rotationswinkel und ggf. eine Mosaik-Definition.
Das Beobachtungsobjekt kann beispielsweise vom zuvor ausgeführten N.I.N.A. “Sky Atlas Tab” übergeben worden sein.
Als Beobachtungsobjekt kann ich auch ein im Planetariumsprogramm (z.B. Stellarium) ausgewähltes Himmelsobjekt übernehmen. Allerdings will der Framing Assistant ausser den Himmelskoordinaten auch noch das dazugehörige Foto laden, was eine Weile dauern kann. Schneller geht das, wenn oben im Faming Assistenten als “Image Source” die “Offline Sky Map” eingestellt ist.
Der so eingestellte Bildausschnitt (=Framing) des Beobachtungsobjekts kann dann als Target in den Sequencer übernommen werden.
Im Sichtbarkeits-Diagramm sieht man, dass das Objekt (M45) vom gewählten Standort nur während der astronomischen Dämmerung sichtbar ist und dann hinter dem “Custom Horizon” (den Häuser) verschwindet.
Die Schaltfläche “Add target to sequence” würde den eingestellten Bildauschnitt (Frame) als “Target” in den Sequencer übergeben, wo wir Einzelheiten zum Fotografieren eintragen könnten…
Hiermit kann man eine sog. einen “Target Set” festlegen.
Für jedes “Target” wird ein Beobachtungsobjekt angegeben und eine Sequenz von sog. “Sequence Entries” die alle nötigen Aktionen festlegen z.B. Wie viele Fotos, Belichtungszeiten, Filterwechsel etc.
Seit N.I.N.A.-Version 2.00 gibt es alternativ zum klassischen “Legacy Sequencer” einen sog. “Advanced Sequencer”
Was der Legacy Sequencer nicht kann:
Starten zu einer bestimmten Uhrzeit
Einen “Custom Horizon” berücksichtigen
Ich brauche solche Funktionen, wenn ich ein bestimmtes Objekt fotografieren will, was bei meinem Horizot erst in der zweiten Nachthälfte sichtbar wird und ich zur dieser Zeit lieber im Bett liege…
Imaging Tab
Hiermit kann man Fotos machen. Die wichtigsten Einzelheiten zum Imaging-Tab beschreibe ich weiter unten.
Options Tab
Die wichtigsten Einzelheiten zum Options-Tab beschreibe ich weiter unten.
Plugins Tab (neu in Version 2.00)
Hier kann man sehen, welche Plugins für N.I.N.A. zur Verfügung stehen und welche Plugins tatsächlich installierten sind.
Interessant ist beispielsweise das Plugin zum Polar Alignment.
Equipment-Tab: Einzelheiten
Equipment: Camera verbinden
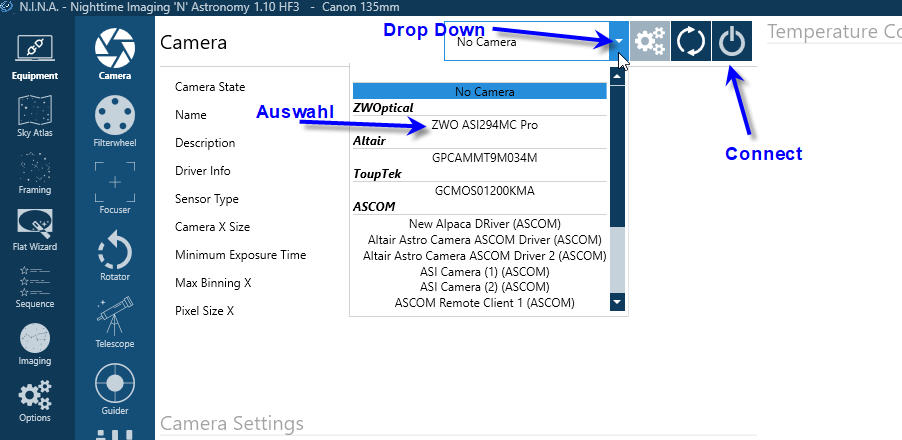
Wir gehen links auf den Equipment-Tab und dann auf Camera.
Aus dem Drop-Down kann ich meine Haupt-Kamera die ZWO ASI292MC Pro mit native driver auswählen (im Drop Down unter ZWOptical). Nur mit native driver funktioniert später der Live View. In N.I.N.A. Version 2.0 wurde der Live View entfernt.
Schießlich klicke ich oben auf die Schaltfläche “Connect”
Abblidung 3: N.I.N.A. Equipment – Camera – Connect (pCloud: NINA-Camera-Connect.jpg)
NINA-Camera-Connect
Equipment: Telescope verbinden
Wir gehen links auf den Equipment-Tab und dann links auf Telescope.
Aus dem Drop-down wähle ich “EQMOD ASCOM HEQ5/6” (nicht EQMOD HEQ5/6).
Schießlich klicke ich oben auf die Schaltfläche “Connect”
N.I.N.A. prüft nun, ob die geografischen Koordinaten des in N.I.N.A. eingestellten Beobachtungsorts mit denen des ASCOM-Treibers des Teleskops übereinstimmen. Im Falle einer Abweichung schlägt N.I.N.A. eine “Synchronisation” vor, wobei die Richtung entweder vom Teleskop zu N.I.N.A. oder von N.I.N.A. zum Teleskop vorgenommen werden kann. Das sollte man auf keinen Fall ignorieren. Bei mir war es nicht möglich von N.I.N.A. zum Teleskop zu synchronisieren, also war es unbedingt erforderlich eine Synchronisation vom Teleskop zu N.I.N.A. vorzunehmen.
Equipment: Guider verbinden
Wir gehen links auf den Equipment-Tab und dann links auf Guider.
Aus dem Drop Down wähle ich “PHD2” .
Schießlich klicke ich oben auf die Schaltfläche “Connect” (vorher muss allerdings PHD2 Guiding gestartet sein)
Equipment: Focuser verbinden
Wir gehen links auf den Equipment-Tab und dann links auf Focusser.
Aus dem Drop Down wähle ich “Pegasus Astro Focus Controller” (weil ich als Controller für meinen Motor-Focusser immer noch den Pegasus nehme…). Aktuell habe ich den ZWO EAF an meinem Teleskop und den Astromechanics-Adapter für meine Canon-Fotoobjektive.
Schießlich klicke ich oben auf die Schaltfläche “Connect”
Equipment: Rotator verbinden
Wir gehen links auf den Equipment-Tab und dann links auf Rotator.
Im Drop Down kann ich manual auswählen, dann bestimmt das Plate Solving den Ist-Drehwinkel des Bildes und N.I.N.A. sagt mir wenn mein geplanter Drehwinkel ein anderer war und hilft bei der Korrektur.
Schießlich klicke ich oben auf die Schaltfläche “Connect”
Equipment: Filterwheel verbinden
Wir gehen links auf den Equipment-Tab und dann links auf Filter Wheel.
(habe ich nicht)
Imaging-Tab: Einzelheiten (Customizing the Imaging Tab)
Wenn wir in der ganz linken Leiste auf “Imaging” klicken, erscheint ein Fenster namens “Imaging”. Dieses kann ganz flexibel in Unter-Fenster aufgeteilt werden – je nach persönlichen Vorlieben.
Wenn wir auf den Options-Tab in der ganz linken Leiste klicken, erscheint links eine weitere Leiste:
General
Equipment
Autofocus
Dome
Imaging
Platesolving
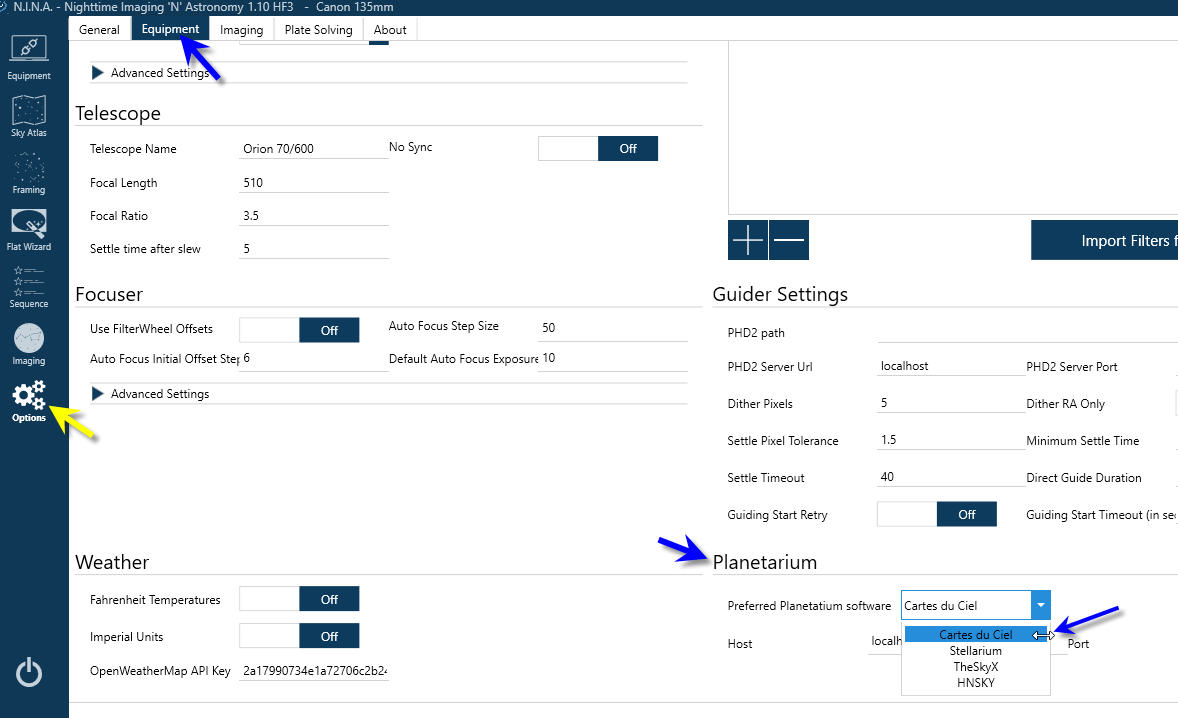
Options: Equipment Tab – Planetariums-Software
Bein Erstellen einer Sequenz mit Hilfe des Framing-Assistenten können die Daten des gewünschen Beobachtungsobjekts vom Planetariums-Programm in N.I.N.A. übernommen werden.
Deshalb gehen wir links auf den Reiter “Options” und dann oben auf den Reiter “Equipment”.
Dort stellen wir im Bereich “Planetarium” im Drop Down “Preferred Planetarium Software” unser gewünschtes Planetariums-Programm ein (im Beispiel: Cartes du Ciel).
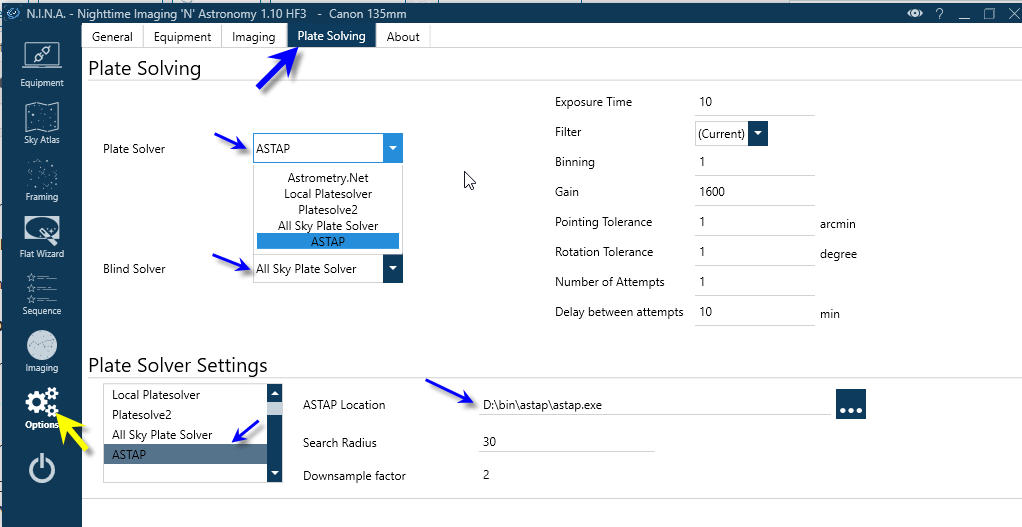
Plate Solving wird von N.I.N.A. an mehreren Stellen im Ablauf automatisch benutzt. Deshalb ist es wichtig, das am Anfang einmal sorgfältig zu konfigurieren und zu testen (Siehe auch: Plate Solving mit N.I.N.A.)
Wir gehen links auf den Reiter Options und dann oben auf den Reiter Plate Solving.
Dort müssen wir nun einstellen welche Software wir als “Plate Solver” (im Beispiel ASTAP) einsetzen wollen und welche Software als “Blind Solver” (im Beispiel All Sky Plate Solver) eingesetzt werden soll.
Dabei meint N.I.N.A. hier mit “Plate Solver” einen “Near Solver”.
Die so ausgewählte Software muss natürlich auf dem Computer installiert sein. Die Dateipfade zu der zu Plate Solving ausgewählten Software muss im unteren Bereich dann angegeben werden.
Da N.I.N.A. extrem viel mit Platesolving macht, müssen die Pfad-Einstellungen für die lokalen Platesolver gemacht werden und möglichst im Profil gespeichert sein – sonst: “Executable not found”
Options: Imaging Tab
Hier können wir diverse Einstellungen für unsere Imaging Session vornehmen. Dies ist gegliedert nach:
File Settings
Meridian Flip Settings
Image Options
Sequence
Layout
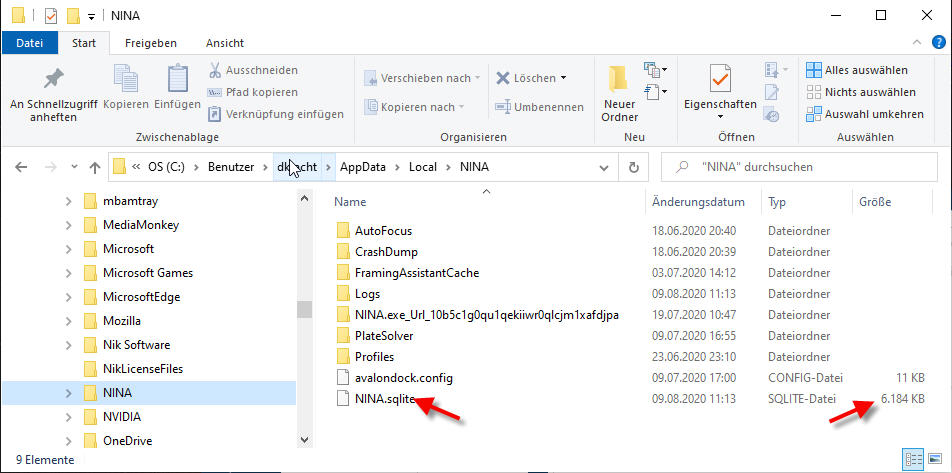
Konfigurationsdatei von N.I.N.A.
Es gibt eine Konfigurationsdatei NINA.exe.config (im Programm-Ordner), die u.a. sagt, wo die N.I.N.A.-Datenbank gespeichert ist.
In meinem Fall ist das der Pfad: c:\users\<name>\AppData\Local\NINA\NINA.sqlite
Dies ist eine SQLite-Datenbank und ich kann sie mit den entsprechenden Tools bearbeiten (zuerst mal anschauen, später vielleicht ergänzen)…
In der SQLite-Datenbank befinden sich folgende Tabellen:
brightstars(name, ra, dec, magnitude, syncedfrom)
visualdescription
dsodetail(id, ra, dec, magnitude,…)
constellationstar
constellationboundaries
constellation
cataloguenr(dsodetailid, catalogue, designation)
earthrotationalparameters
Die Tabelle “cataloguenr” zeigt mit dem Fremdschlüssel “dsodetailid” auf den Primärschlüssel “id” in der Tabelle “dsodetail”.
Die Tabelle “brightstars” kann beispielsweise leicht um Objekte ergänzt werden, die man in der N.I.N.A.-Funktion “Manual Focus Tragets” haben möchte. In dieser Funktion ist dann ein “Slew” möglich…
Z.B. Alpha Cephei “Alderamin” RA=319,646 Dekl=62,5850 (Achtung es muss tatsächlich in Grad und mit Dezimalstellen eingegeben werden!!!)
Die Sterne in dieser Tabelle können bei “Manual Focus Targets” (diesen Reiter aktivieren durch Klicken auf das Symbol “Stern” oben rechts)…
N.I.N.A. Praxisbeispiel: M92
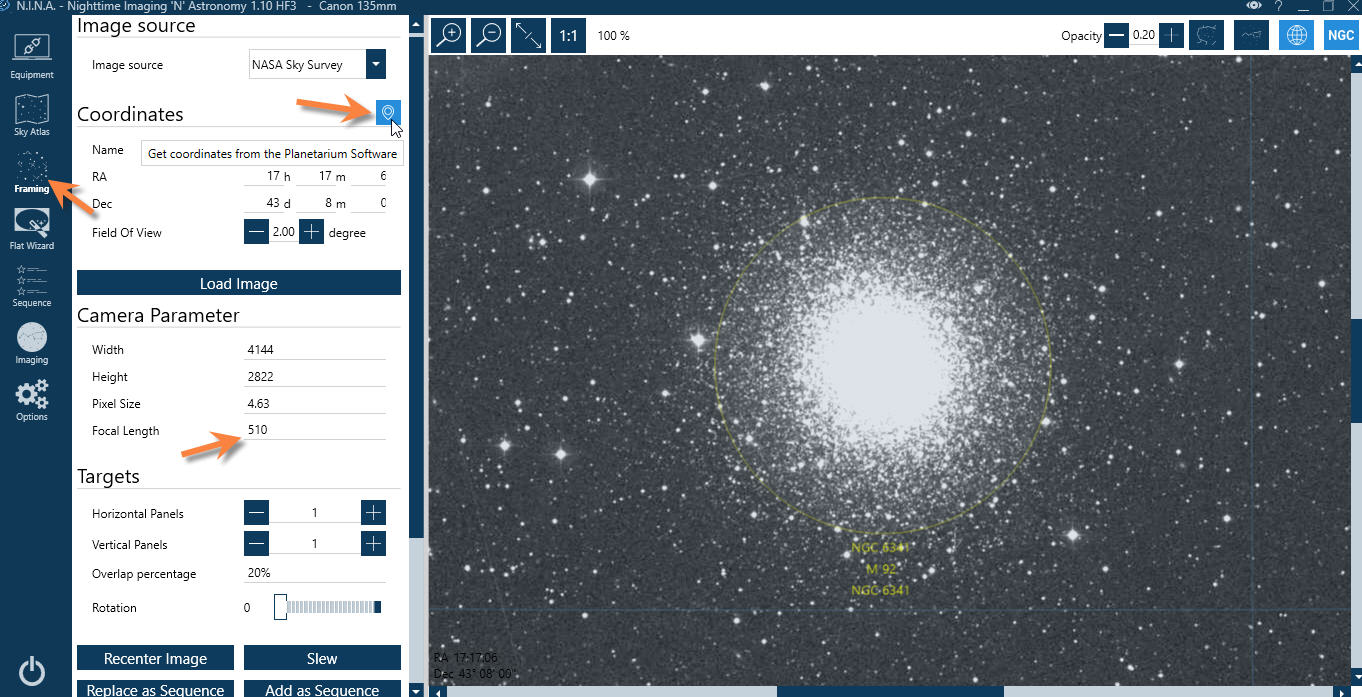
N.I.N.A. Einzelfunktion: Framing
Nachdem wir nun N.I.N.A. installiert und eingerichtet haben, können wir nun endlich ein echtes Astro-Objekt fotografieren. Dazu wollen wir zuerst für das ausgewählte Astro-Objekt den genauen Bildausschnitt festlegen (“Framing”) und das dann als sog. “Sequence” abspeichern.
Wir wählen also ein Astro-Objekt (im Beispiel M92) in unserer Planetariums-Software (im Beispiel ist das Cartes du Ciel) aus.
Dann gehen wir in N.I.N.A. auf den Reiter “Framing”.
Wenn wir im Bereich “Coordinates” auf das Symbol neben dem Wort “Coordinates” klicken, wird das Objekt aus der Planetariums-Software mit seinen Koordinaten in N.I.N.A. übernommen. Alternativ können wir auch den Namen eines Astro-Objekts im Feld “Name” direkt eingeben und die Koordinaten werden übernommen.
Wir können auch auf die Schaltfläche “Load Image” klicken. Dann wird rechts im Hauptfenster ein Foto des Objekts angezeigt, wobei das Bild sogroß wird, wie im Feld “Field Of View” angegeben.
Der Bildauschnitt wird bei gegebener Sensorgröße bestimmt durch die Brennweite; diese sollten wir kontrollieren und ggf. hier richtig eingeben. Dann erscheint ein Kästchen, das den Bildausschnitt zeigt. Dieses Kästchen können wir noch ein bisschen hin und her schieben. Mit dem Mausrad (oder den Symbolen oben) kann man auch in das Bild hineinzoomen oder herauszoomen.
Abbildung 7: N.I.N.A. Framing on Target M92 (pCloud: NINA-Framing-01.jpg)
Am Ende speichern wir da Ganze als sog. “Sequenz” ab (“Replace as”), dabei werden die Koordinaten des Frame-Mittelpunkts an die Sequence übergeben.
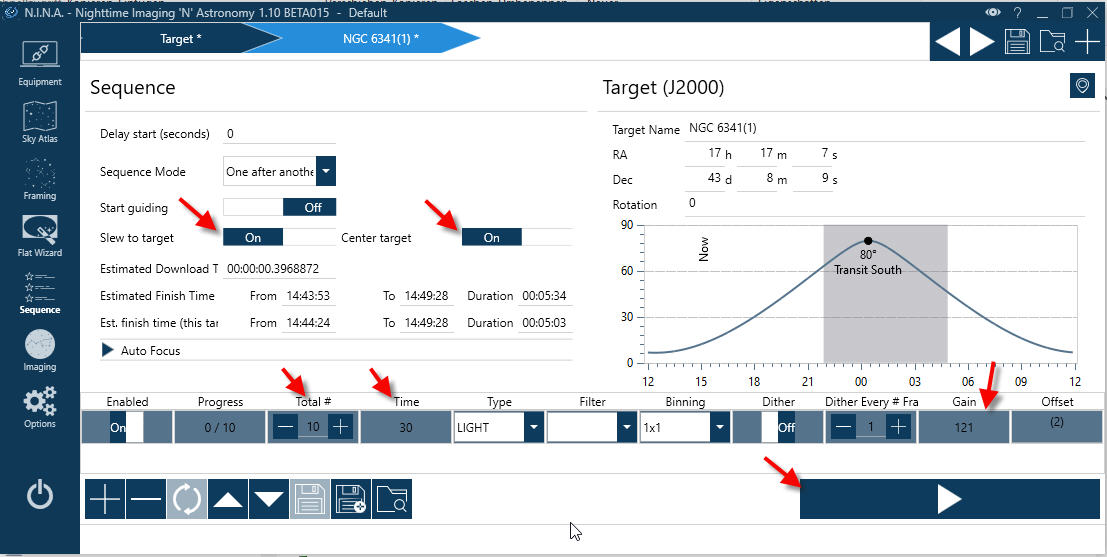
N.I.N.A. Einzel-Funktion Sequence
Nachdem wir mit hilfe des Framing-Assitenmten (s.o.) eine “Sequence” erstellt haben, können wir nun diese Sequence noch ein wenig bearbeiten und dann speichern (oder gleich ausführen).
In unserer Sequence haben wir ein “Target” wofür wir jetzt noch Einzelheiten (z.B. Anzahl Einzelbilder, Belichtungszeit, Gain,…) festlegen können.
Ich schalte auch “Slew to target” und “Center target” an. Dann wird das Teleskop vor der ersten Aufnahme auf das Beobachtungsobjekt (“Target”) geschwenkt (= Goto) und genau auf den Bildmittelpunkt eingestellt (“Center”). Für letzteres wird – ohne das man irgendetwas tun muss – Plate Solving eingesetzt.
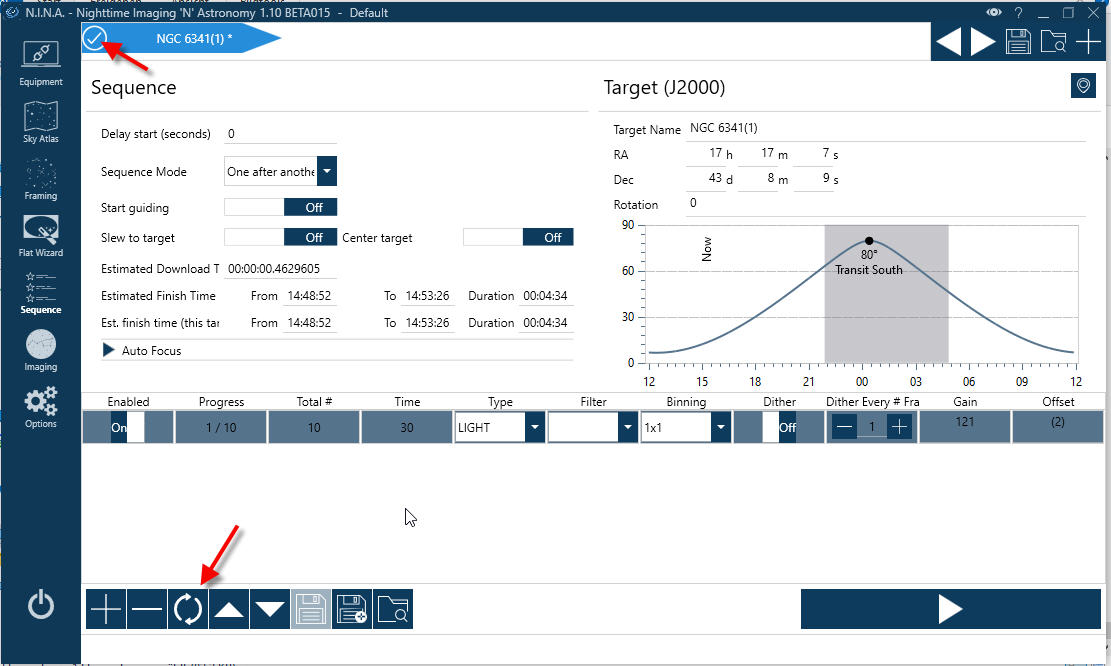
Wenn man eine “Sequence” testweise durchgeführt hat und danach etwas ändern will und die Sequence nocheinmal ausführen will, so geht das ersteinmal nicht. Die Sequence muss erst wieder “aktiv” gesetzt werden…
Anstelle von ausgewachsenen Windows-Computern hört man in letzter Zeit (heute ist Juli 2019) immer öfter von kleinen Geräten, wie “StellarMate” (von der Firma Ikarus Technologies), die den “großen” Windows-Computer in der Astrofotografie ablösen sollen..
StellarMate ist eine kleine Kiste (ein Rasberry Pi Computer), den man an seine Montierung bzw. das Teleskop hängt, und der einiges kann…..
StellarMate ist ein kleiner Computer, mit dem man ohne traditionelle Computer Astrofotografie betreiben können soll – das Ding wird als “Astrofotografie-Computer” bezeichnet.
Es geht ja um eine Lösung zur Astrofotografie, die aus Hardware und Software besteht. Zum Testen der Software verwende ich als ersteinmal in aller Ruhe eine Virtuelle Maschine mit Ubuntu MATE. Wenn das alles wirklich funktioniert, werde ich mich mit der Hardware-Plattform beschäftigen.
Am Ende meiner Weisheit (2020) bin ich reuemütig wieder bei einem kleinen Windows-Computer, der remote über WLAN bedient wird, gelandet.
Eigenschaften des StellarMate
Computer: Der StellarMate-Computer basiert auf einem Raspberry PI 3B+,
Betriebssystem: StellarMate OS auf der Basis von LINUX
Stromversorgung des StellarMate: 5 V
USB: Der StellarMate hat 4 USB 2.0 Anschlüsse und fungiert so also auch als USB-Hub
1 HDMI Anschluss
1 Ethernet-Anschluss
WiFi/WLAN: StellarMate spannt einen WLAN Access Point auf, über den sich ein Tablet mit dem StellarMate verbinden kann. Auf dem Tablet läuft dann eine StellarMate-App.
StellarMate kann sich auch als WLAN-Client in ein vorhandenes WLAN einmelden.
Kameras: StellarMate unterstützt viele Astro-Kameras und auch DSLRs – letztere über INDI und USB
Montierungen: StellarMate unterstützt und viele gängige Montierungen (siehe INDI Driver).
StellarMate controls the mount through INDI. iOptron, Sky-Watcher are all tested with by us.
Steuerung der primären Kamera (am Teleskop) z.B. DSLR Canon EOS 600D
Speicherung der Fotos auf der SD-Karte der Canon
Plate Solving:
Welcher Platesolver soll benutzt werden: Einstellbar: “online” d.h. über das Internet auf astromertry.net bzw. Ansvr, “offline”d.h. der Solver auf MacOS oder LINUX oder “remote” d.h. der Solver auf dem StellarMate
Was soll nach einem erfolgreichen Platesolving gemacht werden? (wird “Solver Action” genannt): Einstellbar: SYNC, Slew to Target, Nothing
Polar Alignment: Das Polar Alignment konnte in früheren Versionen ausschließlich mit der “Main Camera” vorgenommen werden. Jetzt geht es auch mit der “Guide Camera”
Autoguiding wahlweise über ST4 oder Pulse Guiding – mit den “internen Guider” oder auch einem externen…. (PHD2 Guiding???)
Als Guiding-Kamera dient meine vorhandene Altair-Cam….
Motor Focusser: not supported
Erste Schritte mit StellarMate: Einrichten von Stellarmate
Heute am 18.1.2020 kam der StellarMate bei mir per DHL an.
Das StellarMate-Kästchen gehört lokal an das Teleskop; die Bedienung kann remote von einem Laptop über KStars und Ekos erfolgen.
Einen Account eröffnen bei stellarmate.com (mit E-Mail Verification)
Das Stellarmate-Gerät registrieren: /support/licences.html (dazu muss man die Seriennummer des Geräts eingeben)
KStars auf dem Windows-Computer aufrufen (alternativ: StellarMate App auf Apple oder Android)
Innerhalb von KStars Ekos aufrufen: KStars-Menüleiste: Tools -> Ekos
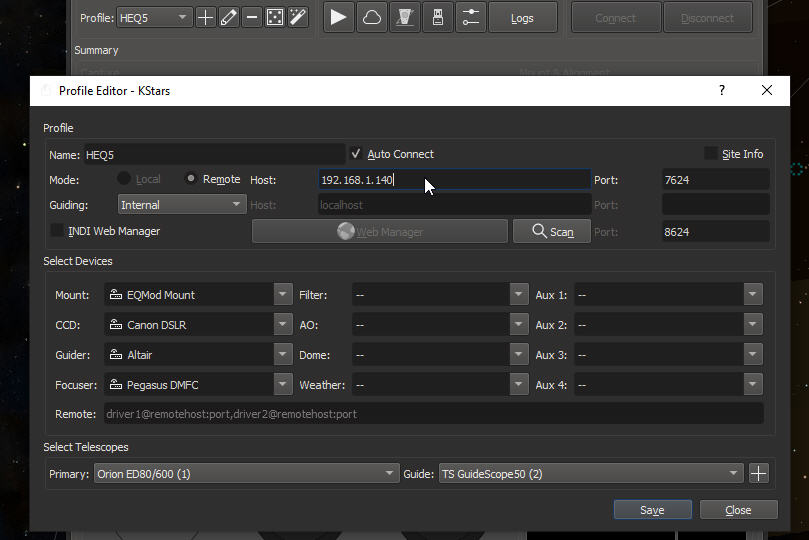
Im Ekos ein Profil einrichten; dabei
INDI-Server “remote host” und dann nicht “localhost”, sondert die IP-Adresse des Stellarmate-Geräts (bei mir: 192.168.1.140)
Select Devices: ….
Select Telescops: ….
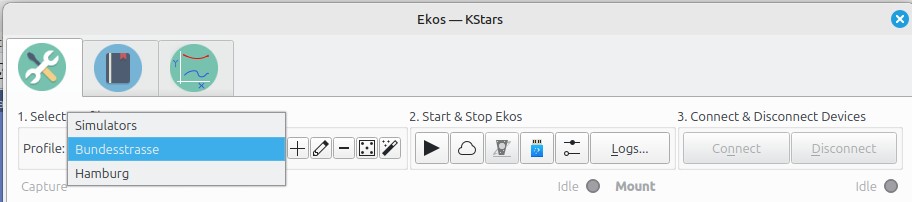
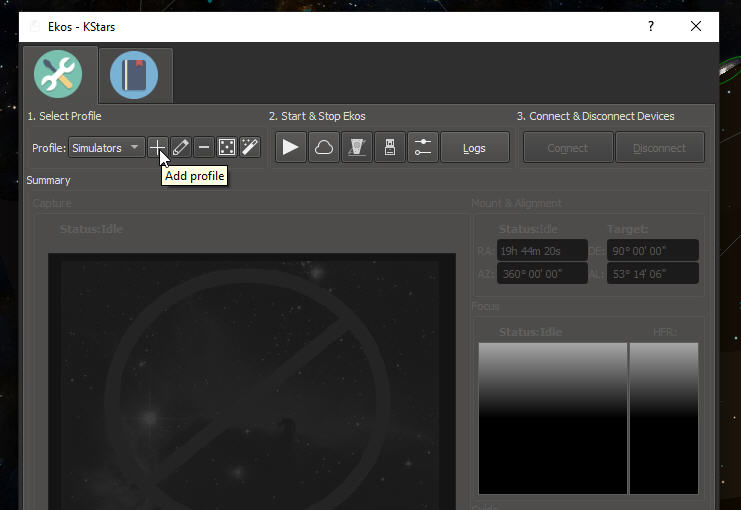
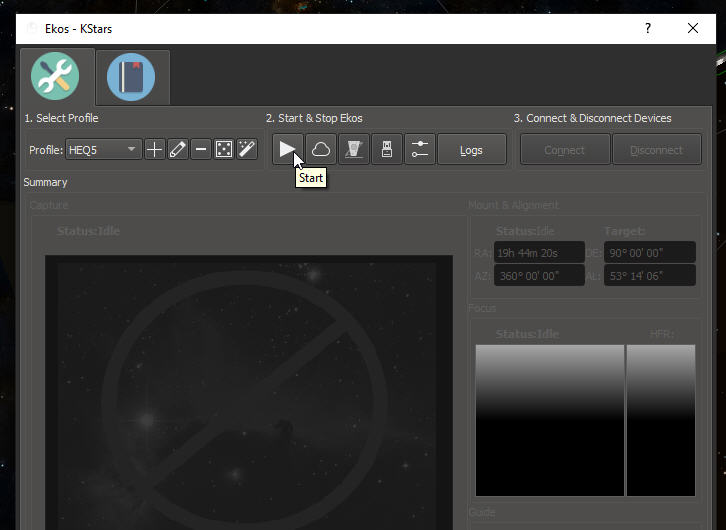
Ekos zeigt immer diese drei Reiter: “Select Profile”, “Start & Stop Ekos” und “Connect & Disconnect Devices”.
Im Ersten Reiter “Select Profile” legen wir ein neues Ekos-Profil an, indem wir au das “+” klicken (s. Bild)
Das neue Ekos-Profil bekommt einen Namen “HEQ5” unter dem wir es später abspeichern und danach aus dem Drop-Down einfach auswählen können.
Wichtig ist. dass wir als “Mode” “Remote Host” auswählen, wenn wir von einem Windows-Computer über das Netzwerk auf den StellarMate-Computer zugreifen wollen.
Weiterhin können wir in dem Profile unsere “Devices” und “Telescopes” angeben.
Nachdem wir Ekos-Profile eingerichtet haben, wählen wir eines aus, mit dem wir jetzt arbeiten wollen und klicken unter dem Reiter “Start & Stop Ekos” auf das Start-Symbol (Dreck mit Spitze nach rechts).
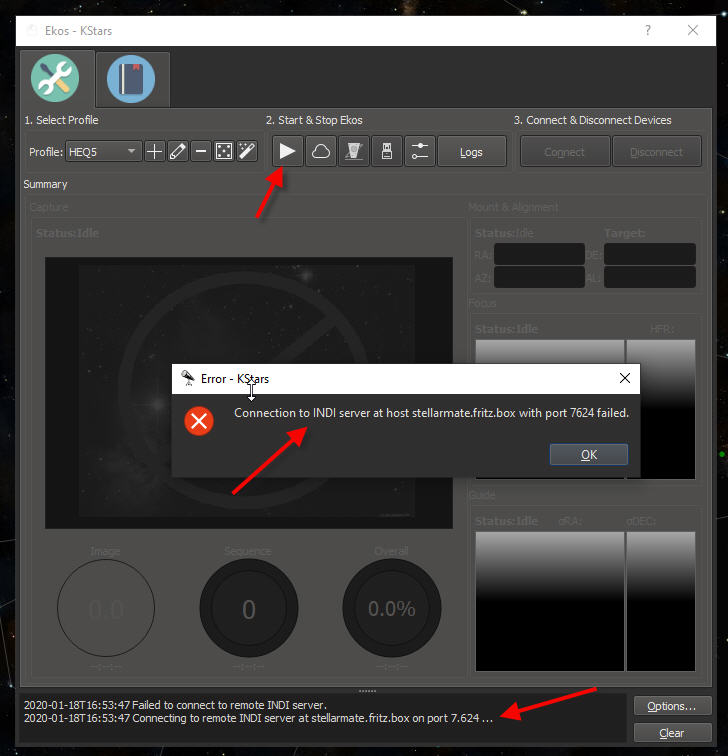
Jetzt versucht das Programm eine Verbindung zum INDI-Server auf dem StellarMate-Gerät herzustellen. Dazu muss das StellarMate über unser Netzwerk per TCP/IP erreichbar sein (Testen mit einem Ping) und der INDI-Server muss mit dem Ekos als INDI-Client über das INDI-Protokoll “sprechen” können (Test, ob der INDI-Server läuft).
Wie das Bild unten zeigt, funktioniert das leider nicht immer… “Failed to connect to remote INDI server”
Abbildung 4: Software Ekos: Failed to connect (pCloud: Stellarmate-06.jpg)
Nach vier Stunden probieren funktionierte es manchmal lokal (mit VNC sichtbar gemacht), aber “remote” ging niemals etwas; weder mit dem StellarMate als WLAN Access Point noch wenn der StellarMate sich in mein heimisches WLAN eingeloggt hatte.
Nun könnte man noch weitere Stunden herumprobieren z.B. mit einen Bildschirm über HDMI am StellarMate etc. etc. pp. oder….
INDI ist eine Astro-Plattform, die alle möglichen astronomischen Geräte ansteuern kann und zur anderen Seite ein einheitliches Protokoll zum Zugriff durch Astro-Software auf diese Geräte bietet. In soweit ist INDI also vergleichbar mit ASCOM.
So ein INDI mit INDI-Server und INDI-Drivers (s.u.) läuft nicht unter Windows, sondern nur unter Linux oder MacOS. Für Windows gibt es einen Wrapper, der INDI über ASCOM realisiert; d.h. es werden nur ASCOM-Geräte unterstützt (also z.B. nicht Canon DSRLs) und auch immer nur über die ASCOM-Treiber…
Ein INDI-Server kann zu einem oder mehreren INDI-Clients verbunden werden. Die Verbindung kann über das Netzwerk hergestellt werden (sog. Verbindungstyp “remote”).
Zur Kommunikation zwischen INDI-Server und INDI-Clients dient das sog. INDI-Protokoll.
Der INDI-Server verbindet sich dan andererseits mit den Astro-Geräten (z.B. Montierung, Kameras, Motor-Fokusser,…). So eine Verbindung zu einem Astro-Gerät wird mit Hilfe eines INDI-Drivers hergestellt.
INDI Library
INDI Library is an Open Source Architecture for Control & Automation of Astronomical Devices. Powered by the community for the community.
Unter der INDI-Library versteht man einen INDI-Server zusammen mit INDI-Drivern für die Astro-Geräte.
INIDI-Driver gibt es für viele Astro-Geräte, nicht nur solche, für die wir ASCOM-Treiber haben. Beispiel: DSLRs.
Für den Betrieb als Astro-Server sind ausser INDI noch einige andere Dienste erforderlich bzw. nützlich:
INDI Web Manager
Remote Desktop
Plate Solving
INDI Web Manager
Installieren auf Ubuntu Mate:
sudo apt-get install python3-pip
sudo -H pip3 install indiweb
Der Schritt2 dieser Installation hat unter Linux Mint nicht funktioniert. Ich bin dann auf Linux Mate gewechselt; dort hat diese Installation des INDI Web Managers geklappt.
Der INDI Web Manger ist offensichtlich ein Python Skript…
Starten auf Ubuntu Mate
Der Start des INDI Web Managers kann ganz einfach manuell erfolgen:
/usr/local/bin/indi-web
Als Linux-Service (Linux-Jargon: Daemon) wird der INDI Web Service so gestartet:
sudo cp indiwebmanager.service /etc/systemd/system/
sudo chmod 644 /etc/systemd/system/indiwebmanager.service
Now configure systemd to load the service file during boot:
Mit einem INDI-Client wird der INI-Server über eine grafische Benutzeroberfläche (GUI) gesteuert.
Klassisch ist KStars mit dem eingebauten Ekos so ein INDI-Client, der auch auf Windows läuft.
Aber auch andere Astro-Programme haben INDI-Client-Fähigkeiten; beispielsweise PixInsight, Cartes du Ciel, Stellarium,…
Auch PHD2 Guiding kann für “INDI Kamera” und “INDI Montierung” konfiguriert werden.
KStars und Ekos
KStars ist eine Planetariums-Software, die auf vielen Plattformen läuft.
KStars enthält Ekos.
Ekos ist eine “Astro-Fotografie-Suite”, die sich als grafischer INDI-Client verhält; d.h. es wird ein INDI-Server benötigt, der typischerweise auf einem separaten kleinen Computer läuft (z.B. eine Rasberry Pi). Der INDI-Server kann aber auch auf dem gleichen Rechner laufen wie der INDI-Client, dann wird die Verbindung vom INDI-Server zum INDI-Client aber trotzdem als “remote” konfiguriert, selbst wenn der “remote” Computer einfach der lokale Computer ist.
Ekos Konfiguration als INDI-Client
Zuerst rufen wir KStars auf. Dort gehen wir zu Ekos.
Damit Ekos richtig als INDI-Client funktioniert, muss eine Verbindung zum INDI-Server hergestellt werden.
INDI Funktionen
Alle INDI-Funktionen werde über einen INDI-Client (z.B. Ekos) gesteuert. Das kann also in aller Regel “remote” erfolgen. Der INDI-Server ist an der Montierung, der INDI-Client ist “remote” z.B. im Auto oder im Wohnzimmer…
Exoplaneten sind Planeten, die andere Sterne (nicht die Sonne) umkreisen.
Bis Ende 2019 wurden ingesammt 4160 Exoplaneten entdeckt.
Historie
Gamma Cephei b: wurde bereits in 1989 Jahren als extrasolarer Planet entdeckt –> später widerrufen –> später neu bestätigt
1992 wurden drei Planeten, die den Pulsar PSR 1257-12 umkreisen entdeckt
1994 wurde ein Planet, der den Pulsar PSR B1620-26 umkreist entdeckt
1995 wurde der Exoplanet 51 Pegasi b entdeckt, der als erster Exoplanet einen sonnenähnlichen Stern umkreist (keinen Pulsar)
2019 wurden Michel Mayor und Didier Queloz für die Entdeckung des Exoplaneten 51 Pegasi b mit dem Nobelpreis für Physik ausgezeichnet
…
Entdeckungsmethoden
Radialgeschwindigkeits-Methode (seit 1995)
Transit-Methode (seit 1999)
Direkte Beobachtung (seit 2004)
Astrometrische Methode “Imaging” (Positionbestimmungen bei Draufsicht –> bisher mit wenig Erfolg, wegen der erforderlichen hohen Genauigkeiten, Versuche mit dem Satelliten Gaja)
u.a.
Das Weltraumteleskop Kepler
Im Jahre 2009 wurde die äußerst erfolgreiche Kepler-Mission gestartet.
Bis 2013 wurden mit dem Weltraumteleskop Kepler über 2000 Exoplaneten entdeckt.
Die sog. “habitable Zone”
Unter anderem stellt man sich ja die Frage, ob es Leben auf Exoplaneten geben könnte.
Als habitable Zone bezeichnet man im Allgemeinen den Abstandsbereich, in dem sich ein Planet von seinem Zentralgestirn befinden muss, damit Wasser dauerhaft in flüssiger Form auf der Oberfläche vorliegen kann. Dies gilt als Voraussetzung für erdähnliches Leben.
Wenn sich ein Exoplanet also in einer solchen Entfernung von seinem Zentralgestrin befindet, könnte möglicherweise “erähnliches Leben” exisitieren, wäre damit alleine aber keineswegs nachgewiesen. Zusätzlich spielen ausser der Entfernung vom Zentralgestirn noch andere Parameter wie z.B. das Vorhandensein einer Atmosphäre eine Rolle. Ausserdem, könnte “Leben” ja auch in ganz anderer Form, als uns von der Erde bekannt, exisitieren….
Protoplanetare Scheiben – Sternentstehung
Wenn die Urwolke, aus der ein Stern entsteht, anfangs nur einen winzigen Drehimplus haben sollte, kann sich daraus eine sog. protoplanetare Scheibe bilden, aus der dann in der Folge Planeten (also Expoplaneten) entstehen.
Die ersten protoplanetaren Scheiben wurden 1994 von C. Robert O’Dell und Mitarbeitern mit dem Hubble-Weltraumteleskop im Orionnebel beobachtet; in diesem Sternentstehungsgebiet sind etwa 50% aller jungen Sterne von einer protoplanetaren Scheibe umgeben.
1998 wurde erstmals eine Scheibe um einen massiven Stern gefunden.
Mit Hilfe von Adaptiver Optik kann man von der Erdoberfläche (z.B. Chile) solche protoplanetaren Scheiben fotografieren.
Die Drake-Gleichnung
Die Drake-Gleichung dient zur Abschätzung der Anzahl der technischen, intelligenten Zivilisationen in unserer Galaxie, der Milchstraße. Sie wurde von Frank Drake, einem US-Astrophysiker, 1961 vorgestellt.
Die Formel wird häufig bei Überlegungen in Bezug auf die Suche nach extraterrestrischem Leben herangezogen. Es handelt sich bei der Gleichung um ein Produkt, von dem die meisten Faktoren unbekannt sind. Waren Drakes ursprüngliche Berechnungen sehr optimistisch, was die Möglichkeit von außerirdischem Leben angeht, so kommen jüngste Lösungen einer Abwandlung der Gleichung unter Einbeziehung von Wahrscheinlichkeitsverteilungen von Sandberg, Drexler und Ord (2018) zu ernüchternden Ergebnissen und legen eine nur geringe Wahrscheinlichkeit von außerirdischem Leben innerhalb und außerhalb der Milchstraße nahe.
wobei:
N die mögliche Anzahl der außerirdischen Zivilisationen in der Galaxis an, die in der Lage und gewillt wären, zu kommunizieren
R* mittlere Sternentstehungsrate pro Jahr in unserer Galaxie
fp Anteil an Sternen mit Planetensystem
ne durchschnittliche Anzahl der Planeten (pro Stern) innerhalb der Ökosphäre
flAnteil an Planeten mit Leben
fiAnteil an Planeten mit intelligentem Leben
fcAnteil an Planeten mit Interesse an interstellarer Kommunikation
L Lebensdauer einer technischen Zivilisation in Jahren