Gehört zu: Teleskope
Siehe auch: Orion ED80/600, ZWO ASI294, ASIAIR
Stand: 02.06.2025
Benutzt: Fotos von pCloud
Smart Telescopes und EAA
Warnung / Disclaimer
Diesen Blog-Artikel schreibe ich ausschließlich zu meiner persönlichen Dokumentation; quasi als mein elektronisches persönliches Notizbuch. Wenn es Andere nützlich finden, freue ich mich, übernehme aber keinerlei Garantie für die Richtigkeit bzw. die Fehlerfreiheit meiner Notizen. Insbesondere weise ich darauf hin, dass jeder, der diese meine Notizen nutzt, das auf eigene Gefahr tut.
Wenn ich Produkteigenschaften beschreibe, sind dies ausschließlich meine persönlichen Erfahrungen als Laie mit dem einen Gerät, welches ich bekommen habe.
Man spricht ja seit einiger Zeit von EAA (= Electronically Assisted Astronomy). Elektronik bei der Astrofotografie zu verwenden ist ja eigentlich eine völlig normale Sache, die wir seit Jahrzehnten verwenden: Digitale Kameras auf computer-gesteuerten Montierungen (ASCOM, Goto, Platesolving,…), Stacking-Software, Post-Processing, Bildbearbeitung etc. Die Hersteller, die heute (2023) von EAA sprechen, meinen damit aber ihre neuen Produkte, die besonders einfach zu benutzen sind und damit eine viel größere Zielgruppe ansprechen, als die sehr spezialisierten klassischen Amateur-Astronomen mit ihren teueren und komplizierten Gerätschaften incl. Software.
Wenn das Teleskop integriert wird mit Komponenten, um die man sich sonst separat kümmern müste (z.B. Autofokus, Kamera, Taukappenheizung, Steuerungs-Computer, Flattener,…), spricht man von “Smart Telescopes“; also so etwas wie “All In One”.
Typische Produkte sind z.B.:
- Dwarf 3
- ZWO Seestar S50
- ZWO Seestar S30
- Unistellar: EvScope2
- Celestron Origin
- …
Typische Merkmale eines “Smart Teleskop” sind:
- Integration der Komponenten “All In One”
- Kann sehr schnell (und damit quasi spontan) zum Einsatz kommen
- Ist klein und leicht (“kompakt”) und kann somit gut auf Reisen mitgenommen werden
- Ergebnisse können schnell “sofort” bestrachtet werden (Live Stacking) – also für Laien, Journalisten etc.
- Ganz einfache Bedienung: Smartphone, Akku bzw. Batterien, WiFi
- Automatisches (motorisiertes) Positionieren auf das gewünschte Objekt: Goto mit Objektkatalog und Platesolving
- Motorisierte Alt-Az-Montierung mit Alt-Az-Nachführung
- Autofokus (Motorfokus)
Das DWARF 3
Bestellt bei: DwarfLabs am: etwa November 2024
Preis: 491,95 € free shipping, 93,47 € taxes
Geliefert am: 30. Mai 2025 durch DHL
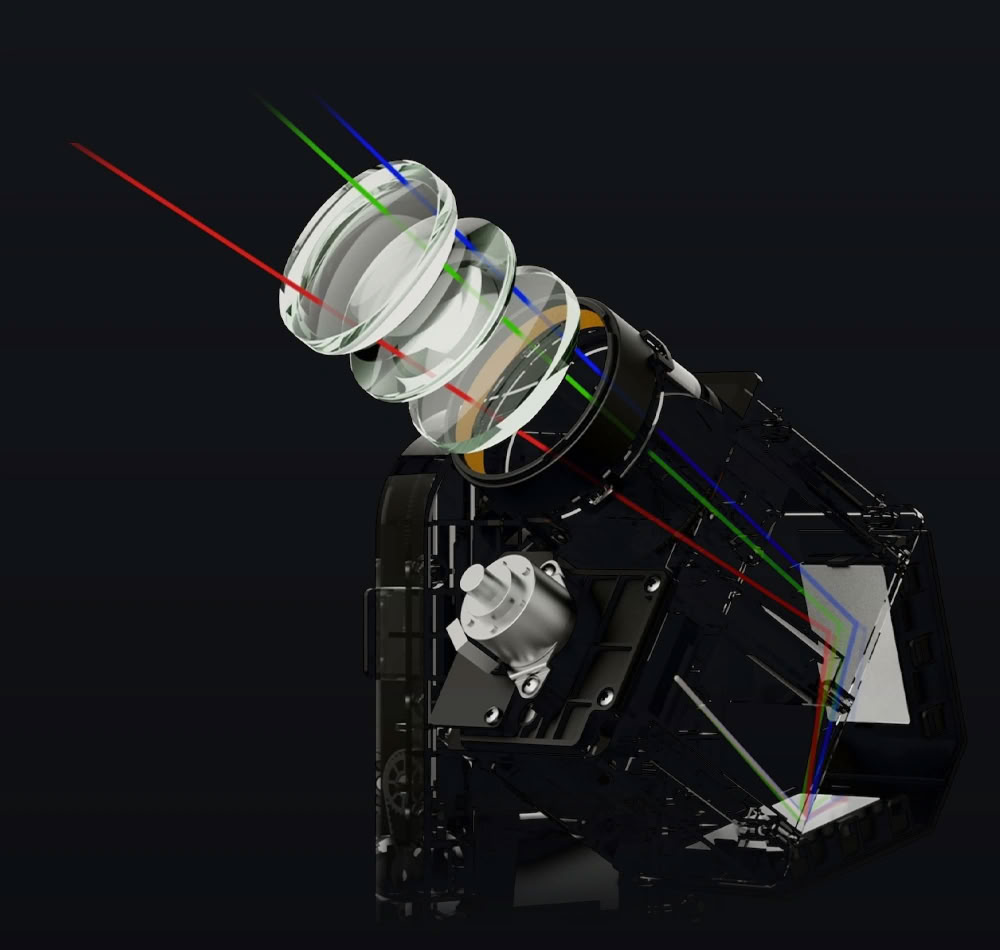
Das Dwarf3-Teleobjektiv hat nur eine Öffnung von D=35mm und eine Brennweite von f=150mm. Das ist nicht viel.
Das ist der kompakten Bauweise geschuldet.
Zusätzlich gibt es eine zweite Optik mit D=3,4 mm und f=6,7mm, genannt “Weitwinkelobjektiv”.
Das Gewicht beträgt 1,35 kg.
Abbildung 1: Strahlengang des Dwarf3 (pCloud: better_scope.jpg). Copyright: DwarfLabs

Vorteile des Dwarf3 sind aber:
- EQ-Modus wird standardmäßig unterstützt. Damit hat man eine bessere Nachführung mit Einzelbelichtungszeiten von 60 sec und mehr, sowie keine Bildfeldrotation.
- Eine zweite Kamera mit Weitwinkelsicht.
Problem auch hier (genau wie bei der ASIAIR): Die Steuerung findet mit einer proprietären Android-App statt, wozu ein Android-Gerät mit einer WiFi (WLAN) -Verbindung zum Dwarf3 gebraucht wird.
Stromversorgung über einen festeingebauten Akku, der eine Kapazität von 10000 mAh hat und der (auch während des Betriebs) über USB-C über PD aufgeladen werden kann.
Android-Emulation auf Windows
Die Steuerung des Dwarf über das kleine Android-Telefon ist gewöhnungbedürftig. Abhilfe könnte ein größeres Android-Tablet schaffen.
Eine Lösung mit vorhandenen Mitteln wäre ein Android-Emulator auf meinem Windows-Computer.
Es gibt einige gute Android-Emulatoren für Windows: BlueStacks, Menu,…
Mit solchen Emulatoren gibt es aber ein paar Problemchen:
- Bluetooth
- GPS
- Download von Files auf den Windows-Computer
Bluetooth kann man beim Dwarf3 einfach abschalten.
Alle gängigen Emulatoren unterstützen aber Bluetooth nicht. Bluetooth wird von der Dwarf-App standardmäßig beim Start benutzt, also geht es (so) nicht auf Windows.
Um Bluetooth der Dwarf-App abzuschalten, habe ich eingestellt: “Einstellungen –> Verbindungseinstellungen -> WLAN beim Start aktivieren”
GPS kann man unter Emulation auch nicht benutzen, also gebe ich meinen Standort in der Dwarf-App manuell ein.
Download von fertigen Bild-Dateien vom Dwarf3 auf den Windows-Computer
Das kann man über eine USB-Kabelverbindung machen (Dwarf-Gerät muss angeschaltet sein) oder ohne Kabel geht es wie folgt:
1. In der Dwarf-App auf Album gehen.
2. Dort die gewünschten Foto-Dateien auswählen und dort auf “Download”. Dann sind die Dateien auf dem Android im Ordner \DCIM\DWARFLAB, was noch nicht ganz reicht, denn der ist ja auch “nur” emuliert.
3. Ausserhalb der Dwarf-App, also auf der Startseite des Emulators MEmu befindet sich ein Ordner “Tools” und in diesem Ordner eine App “Dateimanager”. Damit kopiere ich die gewünschten Bilddateien in den Android-Ordner “Downloads” (dieser wird dann mit einem Winows-Ordner automatisch synchronisiert).
4. Im Android-Emulator gehe ich dann an rechten Rahmen auf die Schaltfläche “Gemeinsame Ordner” und sehe, dass der Android-Ordner “Downloads” synchronisiert wird als sog. “gemeinsamer Ordner” auf den Windows-Ordner “C:\Users\rubas\Downloads\MEmuDownload”
Erste Erfahrungen mit dem Dwarf3
Anschalten: kurzer Druck auf den seitlichen Knopf. Ausschalten: langer Druck auf den seitlichen Knopf.
Der Sternenatalas muss extra heruntergeladen werden (auf jedes Android-Gerär, auch auf jedes emulierte).
Station Mode (“STA”) für zuhause funktioniert gut. Für den Einsatz woanders ist der Hot Spot Modus besser.
Auf meinem kleinen Android-Telefon kann ich schnell die DwarfLab-App herunterladen und die ersten Schritte können gemacht werden.
Die Sonnenfotografie konnte ich als erstes ganz leicht ausprobieren (siehe Astrofotos 2025)
Dann auf einmal geht die Navigation (Steuerung) der Kamera nicht mehr. Da wird bei Start der Dwarf3-App auch etwas von “Joystick” gemurmelt… Aber der Grund ist ein anderer: Ihr Gerät ist derzeit nicht das Hauptgerät. Steuerung deaktiviert.
Durch mein vieles Hin-und-her-probieren bin ich ein “Zweitgerät” geworden – keine Ahnung, wie ich das gemacht habe.
Das Ganze ist ja nur dann ein Problem, wenn man mit mehreren Geräten hin- und her-arbeitet.
Lösung: Alle Geräte abschalten und dann kontrolliert das anschalten, was tatsächlich gebraucht wird. Dann “Aktuelles Gerät als Hauptgerät festlegen”.
Am besten schaltet man bevor man beim derzeitigen Hauptgerät die Verbindung kappt, dort den Schieberegler Hauptgerät auf “Aus” (nach links). Wenn man dann erneut ein Gerät mit dem Dwarf3 verbinden will, könnte man es bewusst auf “Hauptgerät” festlegen…
Um das Dwarf3 auszuprobieren, habe ich mal schnell die Sonne fotografiert. Das habe ich auf Astrofotos 2025 gestellt.
Mein erstes Astro-Foto
Das erste Astrofoto mache ich im AltAz-Modus und gleich direkt d.h. ohne einen Dwarf-Zeitplan.
Das Dwarf-Gerät schraube ich auf ein Fotostativ und stelle es mit einer Wasserwaage schön waagerecht ein. Die Dwarf-Linsen zeigen auf den Sternenhimmel.
Ich starte die Dwarf-App und gehe gleich auf das Symbol “Atlas”. Dort kann ich rechts unten die richtige Zeit einstellen.
Im Atlas klicke ich rechts oben auf das Symbol “Lupe”.
Nun bekomme ich eine Liste von möglichen Beobachtungsobjekten. Da kann ich durchblättern oder benutze das Suchfeld oben. Ich wähle das Objekt “Sadr” aus und klicke auf das Symbol “Kamera”.
Es erscheint der Text “Richten Sie die Linsen auf einen wolkenlosen Himmel mit dichten Sternen und stellen Sie sicher, dass keine Hindernisse vorhanden sind” und ich klicke auf die Schaltfläche “OK”.
Nun macht der Dwarf Drehbewegungen und schiesst Fotos vom Sternenhimmel, die wohl geplatesolved werden, um ein Alignment-Modell zu erstellen.
Anschließend macht der Dwarf ein Goto zum ausgewählten Objekt “Sadr” und startet die Nachführung.
Nun kann ich eine Fotosequenz definieren. Dazu stelle ich den Modus auf “Astro”. Der Auslöseknopf wird nun rot und es erscheint ein konzentrischer Zahnkranz um ihn.
Dann gehe ich auf “Funktionen”, wo im Astro-Modus jetzt spezielle Astro-Funktionen angeboten werden. Oben sieht man folgende Reiter: Einstellungen (Parameter), Darks, EQ Mode, Atlas, Einstellungen (Settings)
Astrofotografie
Die Astrofotografie beginnt mit der Planung. Dazu geht man am einfachsten über den Sternenatlas.
- Ein Objekt aussuchen
- Gesichtsfeld wählen
- Planung: Welche Kamera (Tele oder Weitwinkel), welches Bildformat (JPG, TIFF, FITS)
- Belichtungsserie definieren (Anzahl Fotos, Belichtungszeit, Gain, Filter)
- Geplante Aufnahmesequenz als sog. Plan abspeichern
Das eigentliche Fotografieren dann in der Nacht…
- Nachführung aktivieren – ggf. EQ-Modus
- Aufnahmesequenz starten
- Kontrolle der Aufnahmen
- Herunterladen der Fotos zur Bearbeitung auf den PC
Bildbearbeitung auf dem PC
Stacken, Hintergrund glätten (Gradienten entfernen), Farbkalibrierung, Stretchen,…
Das ZWO SeeStar S50
Preis: 699,– bei https://www.apm-telescopes.net/de/zwo-seestar-s50-smart-teleskop-2
Das Original-Seestar S50 wird von Sternfreunden der älteren Generation etwas kritsch betrachtet, weil…
- Die Öffnung von 50 mm ist kleiner als das, was man so üblicherweise in der Astrofotografie verwendet.
- Die Montierung ist AltAz und nicht EQ. AltAz führt zu Bildfeldrotation mit deutlichen Problemen
- Die Bildverarbeitung geschieht irgendwie intern automatisch
- Die Bedienung geschieht über eine SmartPhone-App.
Das mit der “kleinen” Öffnung von 50mm hat auch mit der kompakten Bauweise zu tun. Schon bei D=50mm hat man f=250mm, wenn man das Öffnungsverhältnis von f/5 haben will. Damit die Bauweise kompakt bleibt, wird der Stahlengang beim S50 schon zweimal gespiegelt; was übrigens bei professionellen Teleskopen durchaus nicht unüblich ist: z.B. James Web Teleskop, ELT in Chile,…
Abbildung 4: Seestar S50 Strahlengang (Copyright: ZWO Astro)
Copyright: ZWO Astro
Die Bildfeldrotation beim S50 hat verschiedene Auswirkungen:
- Das Einzelbild (das Sub) kann nur kurz belichtet werden (z.B. 10 sec) damit auf dem Einzelbild an den Rändern die Sterne noch punktförmig bleiben.
- Beim Stacken der Einzelbilder muss man einiges vom Rand abschneiden, da nicht alle Einzelbilder die gleichen Randbereiche voll erfassen.
EQ-Modus mit einer Wedge
Der Hersteller ZWO unterstützt den EQ-Modus beim S50 nicht.
Man kann trotzdem das S50 auf eine Polhöhenwiege (Wedge) stellen. Dann hat man aber einniges zu berücksichtigen:
- Man muss gut auf das Gleichgewicht achten (z.B. längeres Stativ)
- Ein Polar Alignment muss manuell ausgeführt werden
- Mit der offiziellen Seestar-App können Objekte unterhalb des Himmelsäquators nicht angefahren werden
- Die Belastung des Getriebes durch die Schräglage könnte zu Problemen führen
Seestar ALP
Alternativ zur Bedienung des Seestar über die Seestar-App gibt es eine Software namens “Seestar-ALP”, Dabei steht “ALP” für “Alpaca”.
Die Software ist in Python geschrieben und sollte ursprünglich die in der offiziellen Seestar-App fehlenden Funktionen (z.B. Mosaik) möglich machen.
Mit Python wird ein neues Passwort gesetzt (“Setpassword”, Remote Procedure Call).
Die “Experten” sprechen auch von einem SSC (soll heissen Simple Seestar Controller).
Viele “Ober-Spezialisten” meinen, man müsse Seestar-ALP auf einem Raspberry PI machen. So ein zusätzliches Gerät braucht man aber garnicht: es geht genausogut auf einem Windows-Laptop oder anderen Computern, die Python 3 unterstützen. Man braucht dann lediglich eine TCP/IP-Verbindung zum Seestar.
Mit Seestar ALP können im EQ-Modus auch Objekte unterhalb des Himmelsäquators angefahren werden.
Youtube-Link: Seestar ALP Basic Windows Install and Tutorial
Weiterführende Links
https://www.astrotreff.de/forum/index.php?thread/293126-seestar-alp-steuerung-%C3%BCber-windows-mac-raspberry-pi/
https://github.com/smart-underworld/seestar_alp/releases
https://www.astrophotography.tv/articles/2024/08/seestar-alp-raspberry-pi
https://youtu.be/S17HFlf30tg
https://youtu.be/Cm44uHXo5Rw
Technische Daten im Vergleich
| |
Seestar S50 |
Celestron Origin |
Seestar S30 |
Dwarf 3 |
| Öffnung |
50 mm |
152 mm |
30 mm |
35 mm |
| Brennweite |
250 mm |
335 mm |
150 mm |
150 mm |
| Optik |
Apochromatisches Triplett |
RASA |
Triplet |
ED Sextuplet |
| |
|
|
|
|
| Gewicht |
3 kg |
19 kg |
1,8 kg |
1,3 kg |
| Preis |
699,– |
4990,– |
548,– |
435,– |
| Montierung |
AltAz |
AltAz |
AltAz |
AltAz oder EQ |
| Goto |
Platesoving |
Platesolving |
Platesolving |
Platesolving |
| Stativ |
Dreinbein 3/8″ incl. |
Dreibein |
sehr kleines Dreibein 3/8″ incl. |
1/4″ extra |
| Kamera/Sensor |
Sony IMX462 CMOS |
Sony IMX178 CMOS |
Sony IMX662 CMOS |
Sony IMX678 CMOS |
| Mono/Colour |
Color |
Color |
Color |
Color |
| Amp Glow |
? |
ja |
nein |
nein |
Markteinführung
|
älter |
neu |
neuerer |
neuerer |
| Kühlung |
ohne |
ohne |
ohne |
ohne |
Sensorgröße
|
1080 x 1920 Pixel (5,57 x 3,13 mm) |
3096 x 2080 (7,4 x 4,9 mm) |
1920 x 1080 (5,6 x 3,2 mm) |
3840 x 2160 (7,73 x 4,32 mm) |
| Pixelgröße |
2.9 µ |
2,4 µ |
2,9 µ |
2,0 µ |
| Field of View |
1,3° x 0,7° (78′ x 42′) |
76′ x 51′ |
2,1° x 1,2° (126′ x 72′) |
3,0° x 1,7° (180′ x 102′) |
| Mosaikfunktion |
ja |
nein |
ja |
ja |
| Belichtungszeiten |
10 sec (fest eingestellt) |
10 sec (default) oder mehr |
10 / 20 / 30 sec |
max. 60 sec bei EQ Modus |
| Gain/ISO |
? |
? |
? |
einstellbar |
| Nachführung |
AltAz (field rotation) |
AltAz (flield rotation) |
AltAz (field rotation) |
AltAz oder EQ |
| Dithering |
? |
nein |
? |
nein, nicht erforderlich |
| Fokussierung |
AF nicht perfekt, MF soll kommen |
AF |
AF |
AF/MF |
| Dark Frames |
jedes Mal neu |
Library |
|
|
| Flat Frames |
braucht er nicht |
Library |
|
|
| Bias Frames |
braucht er nicht |
Library |
|
|
| Stacking |
nicht perfekt |
? |
? |
? |
| |
|
|
|
|
| Tauschutzheizung |
ja |
ja |
ja |
nein, nur Taukappe |
| Filter |
UV/IR Cut und sog. Light Pollution, was in Wirklichkeit ein Dual Narrow Band (Ha 20 nm, OIII 30nm) ist (homofokal) |
Filterschublade |
UV/IR-Sperrfilter, Duo-Band-Filter (O-III mit 30 nm HWB, H-alpha mit 20 nm HWB), Dunkelfilter |
VIS-Filter (UV/IR block)
Astro-Filter (UV block)
Duo-Band-Filter |
| Interner Computer |
so eine Art AsiAir-Platine |
Raspberry Pi |
? |
? |
| Bedienung |
Android App |
Android App (ab Version 12) |
Android App |
Android App |
| Verbindung |
|
|
|
WLAN Hotspot oder WLAN Station Mode |
| Transfer der Bilddateien auf PC |
USB or WiFi Storage Drive |
|
|
|
| Stromversorgung |
Akku |
LiFePO4 Akku |
Akku 22,2 Wh (festverbaut) |
Akku |
| Bildbearbeitung |
Entrauschen |
Background extraction,
Gradienten entfernen,
Deconvolution,
Farbkalibrierung,
Stretchen,
Entrauschen,
Schärfen |
Entrauschen |
|