Mindmaps dienen zum kreativen Erarbeiten, Organisieren, Dokumentieren und Präsentieren von Konzepten, Ideen, Wissen in visualisierter Form. Als ihr Erfinder gilt Tony Buzan. Mindmaps werden auch als Ideenkarten, Wissenslandkarten oder Brain Maps bezeichnet. Ein sehr ähnlicher Ansatz sind Concept Maps, die in der Nähe von Semantischen Netzen stehen.
Beispiel:
Eine Mindmap zur BBC-Sendung “The Planets (Sonnensystem, Korona, Sonnenwind und Heliopause)”
Abbildung 1: Meine Mindmap zum Thema “Sonnensystem” (Google Drive: MindmapThePlanets1.jpg)
MindMap The Planets (inspiriert durch BBC)
Die in der ursprünglichen Mindmap vorhandenen Popups kann ich hier in WordPress nicht so einfach realisieren. Deshalb habe sie hier als statischen Text gerettet:
Birkeland
Der Norweger Kristian Birkeland (1867-1917) untersuchte die Nordlichter (Aurora). Welcher Zusammenhang besteht zwischen der Sonnenaktivität und den Nordlichtern?
Heute (2010) ziert sein Konterfei die norwegische 200 Kronen Banknote.
Kometenschweif
Die Ausrichtung der Kometenschweife weg von der Sonne weg kann nicht allein durch den Druck des Sonnenlichts erklärt werden. Das berechnete Ludwig Biermann (1907-1986) und postulierte um 1950 eine “Solar corpuscular radiation”, den Sonnenwind, und wurde von der wissenschaftlichen Welt als Spinner hingestellt, da man es damals für unmöglich hielt, dass Materie aus dem Anziehungsbereich der Sonne entkommen könnte.
Eugene Parker (*1927) konnte 1958 ein schlüssiges Modell der Sonnenkorona, aus der wegen der hohen Temperatur ständig mit Überschallgeschwindigkeit Teilchen herausströmen (der Sonnenwind) theoretisch berechnen. Dieser Teilchenstrom kann das mächtige Gravitationsfeld der Sonne überwinden und erreicht immer langsamer werdend den Rand des Sonnensystems, die Heliopause.
Der Sonnenwind konnte 1992 von der Venussonde Mariner II tatsächlich nachgewiesen werden.
Siehe: Mariner, Voyager, Heliopause.
Mariner II
1992 konnte Mariner II, die erste Sonde, die den Raum zwischen den Planeten erkundete, auf dem Weg zur Venus den von Ludwig Biermann und dann Eugene Parker vermuteten Sonnenwind tatsächlich nachweisen. — Ein ständiger Strom von Teilchen, der sich von der Sonne mit Überschallgeschwindigkeit in das Sonnensystem ergiesst.
Heliopause
Als Heliopause bezeichnet man die Gegend, in der der Sonnenwind zur Ruhe kommt. Dort treffen die letzten Ausläufer des Sonnenwind-Plasmas auf das kalte interstellare Gas.
Voyager
Die Raumsonde Voyager hat nach dem Vorbeiflug an allen äusseren Planeten auch jenseits von Pluto (39 AE) seit Aug. 1992 intensive Radioemissionen auf sehr niedrigen Frequenzen bei 2-3 kHz aufgenommen.
Eine Analyse ergab, Dass diese immer ca. 400 Tage nach besonders starken Sonnenäktivitäten auf traten.
Diese Radiosignale entstehen durch das Auftreffen des Sonnenwind-Plasmas auf das kalte interstellare Gas hinter der Heliopause. Aus den 400 Tagen Laufzeit des Sonnenwindes schätzt man die Entfernung der Heliopause auf 90-120 AE. Soweit reicht also der Sonnenwind.
Dr. Don Gurnett, principal investigator of the Voyager plasma wave subsystem and a professor at the University of Iowa.
Startdaten: September 5, 1977 (Voyager 1) August 20, 1977 (Voyager 2) http://vraptor.jpl.nasa.gov/voyager/vgrhelio_pr.html
Galileo
Galileo Galilei entdeckte die Sonnenflecken mit seinem Fernrohr.
Rotation
Aus der laufenden Beobachtung der Sonnenflecken schloss Galilei auf die Rotation der Sonne.
Magnetfeld
George Ellery Hale baute 1903 in Pasadena ein Sonnenobservatorium mit einem grossen Spektrographen. 1908 beobachtete er die Verdopplung der Spektrallinien bei Sonnenflecken, was er sofort als Einfluss eines starken Magnetfelds deutete. Sonnenflecken entstehen also durch Störungen des Magnetfelds der Sonne.
Skylab
1973 startete das erste Weltraumlabor. Eine wichtige Aufgabe war die Sonnenbeobachtung ohne den störenden Einfluss der Erdatmosphäre. Dabei wurden bis dahin unbekannte “solar mass ejections” beobachtet. Das sind grosse Plasmagebilde, die sich eruptionsartig von der Sonne wegbewegen und sich von ihr zu lösen scheinen.
Sonnenfinsternis
Zufälligerweise sieht der kleine Mond von der Erde aus genau so groß aus, wie die riesige Sonne – weil die Sonne soviel wie sie grösser ist auch weiter weg ist.
Deshalb sind ca. sechsmal im Jahrzehnt totale Sonnenfinsternisse zu beobachten. Dabei wird die Sonnenkorona sichtbar.
Secchi
Pater Angelo Secci vom vatikanischen Observatorium baute den ersten Spektrographen für astronomische Beobachtungen.
Der Vergleich von Sonnenspektrum und Sternenspektren zeigte, dass die Sonne ein Stern ist.
Helium
Im Sonnenspektrum entdeckte man ein auf der Erde damals unbekanntes Element und nannte es deshalb “Helium”.
Schwere Elemente
Die schwereren Elemente werden durch Kernfusion im inneren der Sonne (und der vielen anderen Sterne) erzeugt.
Die Materie, aus denen wir bestehen (Kohlenstoff, Sauerstoff, Stickstoff,…) und aus denen die Erde besteht (Silizium,…), stammt also aus dem Inneren der Sterne.
Wir bestehen aus Sternenstaub (Stardust).
SOHO
Im Dezember 1995 startete das SOHO (Solar and Heliospheric Observatory). Es ist ein Gemeinschaftsprojekt von NASA und ESA und soll die Sonne unterbrechungsfrei beobachten. Deshalb wurde SOHO nicht in eine Erdumlaufbahn geschossen, sondern auf dem Langrange-Punkt L1 des Sonne-Erde-Systems geparkt. L1 liegt ca 1,5 Mio km (1/100 AE) von der Erde in Richtung Sonne. Das besondere ist, dass obwohl dieser Punkt näher an der Sonne liegt, die Umlaufzeit trotzdem auch genau ein Jahr beträgt.
Instrumente unter vielen anderen: EIT (Extreme ultraviolet Imaging Telescope) 304, 195 und 171 LASCO (Large Angle and Spectrometric Coronagraph) C2 und C3 MDI/SOI (Michelson Doppler Imager/Solar Oscillations Investigation) http://sohowww.nascom.nasa.gov/data/realtime-images.html
Mit der kostenlosen Software StarStaX kann man Astrofotos übereinanderlegen (stacken), die eine Bewegung veranschaulichen sollen. Dabei können optional auch kleinere Lücken in der Bewegung gefüllt werden.
z.B. Strichspuren um den Himmelspol (Norden oder Süden)
Wenn PHD2 Guiding läuft, schreibt es eine Log-Datei. Während des Guiding scheibt es laufend Guiding-Werte in die Log-Datei. Neben den laufenden Korrekturwerten gehört auch das laufend gemessene SNR dazu.
Erst beim nächsten Start von PHD2 Guiding wird eine neue Log-Datei begonnen.
Mit PHD2 Guiding –> Brain-Symbol (= Erweiterte Einstellungen) -> Reiter “Global” wird Ort dieser Log-Datei eingestellt.
Bei mir ist es: c:\users\dkracht\documents\phd2
In diesen Ordner schreibt PHD2 sein sog. “Guide Log”. Der Dateiname ist: “PHD2_GuideLog_YYYY-MM-DD-HHMMSS.txt”
In der Astrofotografie definiert man nun das Signal to Noise Ratio (SNR) einfach als:
Autoguiding ist garnicht erforderlich, wenn man mit kürzeren Belichtungszeiten für die Einzelaufnahmen arbeitet. Das sehr niedrige Ausleserauschen meiner CMOS-Kamera ZWO ASI294MC Pro lässt ja viele kurze Einzelaufnahmen (je nach Brennweite z.B. 120 x 60 Sekunden), die man zu einem Summenbild stackt, ja prinzipiell zu.
Dann reicht die Genauigkeit der Nachführung (Tracking) durch meine Montierung HEQ5 Pro völlig aus. Voraussetzung ist allerdings, dass die Montierung gut eingenordet ist. Ein Versuch hat bei mir in Hamburg-Eimsbüttel ergeben, dass das Tracking meiner Montierung HEQ5 Pro sogar bei Belichtungszeiten von 240 Sekunden und f=510mm noch so genau ist, dass die Sterne punktförmig abgebildet werden. Ich brauche also in diesem Falle gar kein Autoguiding.
Je nach der Himmelshelligkeit (Lichtverschmutzung) an meinem Beobachtungsort komme ich zu ganz unterschiedlichen maximalen Belichtungszeiten. In der Großstadt liegt das eher bei 120 Sekunden und in Namibia vielleicht bei 15 Minuten.
Bei meiner Aufnahme-Software APT (oder N.I.N.A.) kann ich also ggf. die Verbindung zu PHD2 Guiding abstellen.
Die tatsächliche Genauigkeit des Trackings allein durch die Montierung (also ohne zusätzliches Guiding) zeigt uns sehr schön der Guiding Assistent von PHD2 Guiding (s.u.).
Wenn man tatsächlich ohne Autoguiding arbeiten will, sollte man sich um den Periodic Error seiner Montierung kümmern.
The Lazy Geek: Youtube Video “Understanding Autoguiding”
Nomalerweise sollten die Defaultwerte für alle PHD2-Parameter gut sein (diese Defaultwerte werden vom “New Profile Wizzard” gerätespezifisch auf gute Werte gesetzt).
Was man allerhöchstens ändern sollte sind die Werte für “Minimum Movement“.
Ansonsten kann man einen “Reset” bewirken auf: Advanced Settings (Brain-Symbol), Reiter “Algorithms”
Polar Alignment
Eine ungenaue Polausrichtung macht sich, wenn Autoguiding gemacht wird nur durch eine Bildfeldrotation bemerkbar.
Diese ist aber bei kleinen Gesichtsfeldern kaum bemerkbar.
Hierfür werden Werte von 0,5 bis 1,0 x Siderial Tracking Speed gehandelt (bei ASCOM-Pulse-Guiding).
PHD2 benutzt diesen Faktor um bei einer Abweichung des Leitsterns vom Sollwert die Länge des erforderlichen Guiding-Impulses zu berechnen.
In Rektaszension (R.A.) bewegt sich die Achse ja schon mit der eingestellten Tracking-Geschwindigkeit (z.B. “Siderial”); das Guiding ändert dann diese eingestellte Tracking-Geschwindigkeit um den Betrag Guiding-Faktor * Tracking Geschwindigkeit.
Beispiele: Guiding Speeds bei verschiedenen Guiding Faktoren – bei Sideriel Tracking = 1.0
Tabelle 1: Guiding Speeds
Guiding Faktor
R.A. Speed östlich
R.A. Speed westlich
1,0
0,0
2,0
0,9
0,1
1,9
0,6
0,4
1,6
0,5
0,5
1,5
PHD2 sendet die errechnete Guiding-Korrektur an die Montierung. Die Montierung führt dann die gesendeten Guiding-Befehle aus.
Was genau PHD2 an Guiding-Information an die Montierung sendet ist verschieden, je nach dem ob ST4-Guiding oder ASCOM-Pulse-Guiding eingestellt ist.
Im Falle von ASCOM-Pulse-Guiding ist der von PHD2 über den ASCOM-Treiber an die Montierung gesendete Befehl: “guide for XXX ms”.
Der Guiding Speed Faktor hat dann wenig Einfluss auf die Qualität des Autoguidings. Man könnte Werte von 0,5 oder höher nehmen.
Im Falle von ST-4-Guiding schickt PHD2 zwei Befehle: “guide” und “guide off” in dem von PHD2 berechneten Zeitabstand an die Guiding-Kammera, die das quasi als Relay weiterleitet über das ST-4-Kabel an die Montierung.
Die Montierung liest die ST-4-Befehle aber im Polling-Verfahren aus; d.h. nur alle soundsoviel Millesekunden. Dadurch kann es bei kürzeren Guiding-Dauern zu Ungenauigkeiten kommen (sog. polling error).
Bei ST-4-Guiding sollten man eine langsame Geschwindigkeit nehmen, damit die Zeitdauer länger ist. Da könnte man einen Faktor von 0,25 nehmen.
Ich hatte meine Astro-Ausrüstung im Jahre 2016 so ausgesucht, dass auch das sog. Autoguiding möglich ist – obwohl ich nicht so recht wusste, ob ich das eigentlich brauchen würde. Zum generellen Punkt der Nachführung habe ich einen separaten Artikel geschrieben.
Aber ich möchte ja “alles” mal ausprobieren.
Meine Montierung ist eine iOptron SmartEQ Pro und verfügt über einen ST-4 Port, der ASCOM-Treiber unterstützt aber kein “Pulse Guiding“.
Jetzt (2017) habe ich eine Montierung Skywatcher HEQ5 Pro, die auch einen ST4-Port hat und den ASCOM-Treiber EQMOD unterstützt mit “Pulse Guiding”.
Die Guiding-Kamera ist eine Altair GPCAM MT9M034M und verfügt ebenfalls über eine ST-4-Schnittstelle zum Autoguiding.
Zum Autoguiding benötigt man einen Computer mit einer Autoguiding-Software. In aller Munde ist die kostenlose Software “PHD2 Guiding“, die ursprünglich Craig Stark entwickelt hatte. Es gibt aber auch sog. “Stand Alone Lösungen” (d.h. ohne Computer) zum Autoguiding z.B. Lacerta M-GEN, StarAid u.a.
Zum Autoguiding mit PHD2 Guiding ist jeder noch so einfache Windows-Computer (oder Laptop oder Nano-Computer) geeignet. Besonders interessant ist es, alle Astro-Software (bei mir: CdC, APT, N.I.N.A., ASPS, PlateSolve2, ASCOM,…) über einen kleinen Windows-Computer laufen zu lassen und dann eine Remote-Steuerung von einem warmen Plätzchen aus vornehmen zu können.
So eine Remote-Steuerung sollte auch mit einem kleinen Linux-Computer, wie z.B. einem Raspberry Pi möglich sein…
Zusammenfassung: Meine Guiding-Parameter
Tabelle 2: Die wichtigsten Parameter auf einen Blick (die Defaultwerte von PHD2 sollten eigentlich reichen):
Parameter
Wo?
Wert
Bemerkung
Auffinderegion
Guiding Tab
15 px
Sterngrößenerkennung
Guiding Tab
50.0
Brennweite
Guiding Tab
180 mm
Kalibrierungsschritte
Guiding Tab
750 ms
berechnet abh. von Dekl.
R.A. Algorithmus
Algorithmus Tab
Hysterese
R.A. Hysterese
Algorithmus Tab
20%
Prozent der vorigen Guiding-Impulse
R.A. Agression
Algorithmus Tab
75%
R.A. Minimum Movement
Algorithmus Tab
0.1 px
R.A. Max. Dauer
Algorithmus Tab
6000
Dekl. Algorithmus
Algorithmus Tab
Widerstehe Wechsel
Dekl Agressivität
Algorithmus Tab
90%
Dekl. Minimum Movement
Algorithmus Tab
0,1 px
Dekl. Max. Dauer
Algorithmus Tab
8000
Dekl. Modus
Algorithmus Tab
Auto
Erste Schritte mit PHD2 Guiding im Überblick
Die Schritte im Überblick:
Installation der Software PHD2 Guiding
Allgemeine Astro-Vorbereitungsschritte (noch ohne PHD2 Guiding)
Verbinden des PCs mit Kamera und Montierung (ggf. Simulationen !!!) — bei zwei Kameras, die RICHTIGE hier auswählen
Live-Bild in PHD einstellen – wichtig: fokussieren
Guiding-Stern auswählen
Kalibrierung – welche Parameter sind für die Kalibrierung wichtig?
Guiding und Optimierung des Guiding
Die Ersten Schritte mit PHD2 Guiding im Einzelnen
1. Installation der Software
Bei der Erst-Installation auf einem meiner Windows-Compter wurde die Datei MSVP120.dll als vermisst gemeldet.
Durch Installation des “Microsoft Visual C++ 2013 Redistributable (x86) 12.0.21005” konnte ich dieses Problem lösen.
2. Vorbereitende Schritte
Jetzt benötigen wir generelle vorbereitende Schritte, die noch ohne die Software PHD2 Guiding erfolgen.
Eine erste grobe Fokussierung mache ich schon am Tage an terrestischen Objekten
Die feine Fokussierung der Guiding-Optik mache ich am besten sofort nach dem Einnorden. Da habe ich einen halbwegs hellen Stern, Polaris, bei dem die Fokussierung leichter möglich sein sollte.
Das Fokussieren mache ich nicht mit der Software PHD2 Guiding, sondern mit der Astrofotografie-Software, die ich auch sonst zum Fotografieren benutze (z.B. SharpCap).
Goto auf das Beobachtungsobjekt z.B. eine Gegend, die für die PHD2 Guiding Kalibrierung geeignet ist.
3. Verbinden der Geräte mit PHD2 Guiding (Kamera und Montierung)
Wenn man PHD2 Guiding startet, muss man zuerst die Geräte (Kamera, Montierung etc.) verbinden. Dazu klickt man in der unteren Leiste auf das erste Symbol von links (Stecker-Symbol). Dort kann man die Geräte einzeln verbinden oder man benutzt den “New Profile Assistant”.
Bei der Kamera ist das klar: Gemeint ist die Nachführkamera, also meine Altair-Kamera GPCAM entweder direkt (d.h. per Windows-Treiber) oder über ASCOM (also ASCOM installieren).
Klicken auf Schaltfläche “verbinden”
Verbindung zur Montierung
Bei der Montierung kann man schnell einen Fehler machen. Als neu gelerner ASCOM-Fan dachte ich natürlich daran, jetzt den ASCOM-Treiber meiner Montierung auszuwählen. Das ist aber Quatsch, weil ich die Montierung ja schon per ST-4 mit der Nachführkamera verbunden habe. Ich sollte im PHD bei Montierung also auswählen “on camera“, was für mich nicht wirklich intuitiv war. Dies ist also die Vorgehensweise für ein sog. “ST4-Guiding”, alternativ wäre auch ein “ASCOM Pulse Guiding” (wenn die Montierung und der Treiber das denn unterstützt) möglich.
Klicken auf “verbinden”: Nun verbindet sich PHD2 Guiding über den ST-4-Anschluss der Nachführkamera mit dem ST-4-Anschluss der Montierung.
ASCOM Pulse Guiding: Alternativ kann man auch statt der Verbindung per ST-4, die Montierung direkt mit dem Computer per serieller Schnittstelle (bzw. USB) und ASCOM/EQMOD verbinden. Das Kabel zur Montierung benötigt man ja sowieso; also spart man ein Kabel, nämlich das ST4-Kabel) und ermöglicht dem Guiding-Programm Kontakt zur Montierung aufzunehmen um z.B. die Deklination festzustellen, was bei der Kalibrierung wichtig ist.
Vorteile von ASCOM Pulse Guding:
Bei ASCOM Pulse Guiding muss man nur einmal kalibrieren, da PHD2 Guiding die Deklination kennt und entspreched umgerechnet. Bei ST4-Guiding muss bei jedem neuen Zielobjekt zuerst neu kalibriert werden.
Wenn man sowieso Teleskopsteuerung über ASCOM machen will z.B. Goto per Cartes du Ciel, braucht man sowieso eine Verbindung zur Montierung und spart das extra ST4-Kabel ein.
Beim ASCOM Pulse Guiding sendet PHD2 zur Guide-Korrektur nur einen Guide-Befehl mit der Zeitdauer an die Montierung. Das ist meisten genauer als beim ST-4-Guiding, wo ein Start- und ein Stop-Befehl von PHD2 via Guiding-Kamera an die Montierung gesendet wird.
Die von PHD2 Guiding gesendeten Guiding-Befehle und deren Reaktionen werden im Log-File festgehalten und können später analysiert werden. Bei ST4-Guiding weiss PHD2 fast nichts und das Log-File sagt nichts aus.
Verbindungsprofil
Die ausgewählten Verbindungen (zu Kamera und Montierung) sowie die dazu vorgenommenen PHD2-Einstellungen (s.u.) können in einem sog. Profil gespeichert werden.
Zu einem solchen Verbindungsprofil stellt PHd2 Guiding dann spezifische Defaultwerte für die Guiding-Parameter ein.
Dunkelbilder
Nun sollte man sog. Dunkelbilder in eine Bibliothek ablegen…
Dunkelbilder sind z.B. wichtig, wenn PHD2 seinen Guiding-Stern automatisch aussuchen soll; dann sollte PHD2 kein Hot Pixel als Leitstern aussuchen…
Auf das Loop-Symbol (Zwei Pfeile im Kreis; in der unteren Leiste das zweite Symbol von links) klicken und es erscheinen Bilder der Nachführkamera auf dem Computer-Bildschirm (das Live-Bild).
Am Anfang ist man häufig völlig ausser Fokus; dann sieht man im Live View erst einmal nichts. Man muss mit dem Fokus mal grob hin und her probieren, bis man im PHD-Live-View tatsächlich Sterne sieht, die man dann auch noch mit der Fokusfeineinstellung schön scharf einstellt. Am besten fokussiert man gleich nach dem Einnorden auf den Polarstern – und zwar mit SharpCap.
Eine grobe Fokussierung auf ein weit entferntes terrestrisches Objekt sollte im Vorwege geschehen…
Belichtungszeit und Gamma
Parallel zum Fokussieren muss man eine sinnvolle Belichtungszeit einstellen (so dass man mehrere schöne Sterne auf dem Bildschirm sieht).
Als Camera Exposure (unten im Drop-Down rechts neben dem Stop-Symbol) werden 2,0 bis 4,0 sec empfohlen. Längere Belichtungszeiten sind vorteilhaft bei schlechtem Seeing und längeren Brennweiten, da über die Zeit hinweg gemittelt wird. Meine Einstellung: 3.0 sec.
Rechts neben dem Drop-down für die Belichtungszeit befindet sich ein Schieberegler, der das Gamma für den Bildschirm einstellt: ggf. nach links schieben, um schächere Sterne zu sehen.
Es gibt noch einen sog. “Cam Dialog” das ist das Symbol rechts vom “Gehirn-Symbol”…
5. Guiding-Stern auswählen
Nun wählt man einen Stern durch Anklicken mit der Maus als sog. “Leitstern” aus. Der Leitstern wird von PHD2 mit einem grünen Kästchen umrahmt, der sog. Auffindregion (Anzahl Pixel einstellen im Brain Tab “Guiding”).
Der Leitstern sollte nicht “ausgebrannt” sein, sondern mittel-hell. ggf. Menü –> View –> Display Star Profile
Der Leitstern sollte nicht zu sehr am Rande des Gesichtsfeldes liegen.
Damit man im Live-Bild der Guiding-Kamera möglicht viele Sterne sieht, evtl. das “Gamma” etwas aufziehen…
Anfangs könnte es hilfreich sein, den Leitstern automatisch von PHD2 wählen zu lassen (Alt-S oder Menü: Erweiterungen (Tools) -> “Autoauswahl Stern” – “Auto-select Star”); dazu wäre eine aktuelle Dunkelbild-Bibliothek sinnvoll.
In der Statusleiste unten links werden nun zwei Zahlen angezeigt: m=… und SNR=…..(magnitude und Signal Noise Ratio — Aber was sagen diese Zahlen ???????) –
Danach kann man jetzt auf das Symbol “Guiding” klicken (rechts vom Symbol “Looping”).
Da tut sich erst einmal garnichts. Ich dachte schon, alles Mist und den Versuch abbrechen. Aber: Wenn man auf Guiding klickt, startet eben nicht das Guiding, sondern die Calibration. Es startet also die sog. Kalibrierung, was man unten links in der Statuszeile sehen kann, wo die Kalibrierungsschritte angezeigt werden…
6. PHD Calibration
Also wenn man jetzt auf das Symbol “Guiding” (in der unteren Leiste das dritte von links) klickt, beginnt also zunächst eine sog. Calibration.
In der Statusleiste unten links werden die Kalibrierungsschritte angezeigt.
Warum Kalibrierung?
PHD2 benötigt die Kalibrierung für zwei Dinge:
messen wieviel ein Guiding-Impuls die Montierung bewegt (Bogensekunden bzw. Pixel)
messen des Drehwinkels der Guiding-Kamera in Bezug auf die Montierungsachsen
Ablauf der Kalibrierung
Zur Calibration werden Guiding-Impulse in alle vier Richtungen (West, Ost, Süd, Nord) geschickt und dann gemessen, wieviele Pixel bewegt wurden; wobei nur die West- und Nord-Bewegungen tatsächlich für die Kalibrierungs-Rechnung herangezogen werden – Ost und Süd dient nur zum Zurückfahren.
Calibration: Einstellung der Guiding Steps – Nachführungsschritte
Bei der Kalibrierung möchte PHD2 den Leitstern schrittweise um 25 Pixel in jeder Richtung bewegen…
Evtl. hat man zu wenig Guiding-Steps; dann sollte unter Settings im Tab “Guiding” die Guiding-Steps (ms) verändert werden am besten mit Hilfe der Schaltfläche “Calculate…”
Bevor man die Guiding-Steps selber einstellt, sollte man Brennweite und Pixel-Größe der Guiding-Kamera korrekt eingegeben haben:
Die zeitliche Länge (Dauer) eines Kalibrierungsschritts (in Millisekunden) kann man selbst per Hand eingeben. Wenn die Kalibrierung zu lange dauert, kann man die Dauer eines Impulses erhöhen, damit die angestrebten 25 Pixel mit weniger Schritten erreicht werden. Hilfreich ist dabei aber die Schaltfläche “Berechnung…” (hinter Erweiterte Einstellungen -> Nachführen -> Kalibrierungsschritte).
Es wird empfohlen, die Nachführgeschwindigkeit auf 0,5 einzustellen.
Für die Anzahl der Kalibrierungsschritte wird so etwa 12 empfohlen. Man muss die Kalbrierung dann mal beobachten, ob die Anzahl der Kalibrierungsschritte mit der Dauer in Millisekunden passt, um eine Bewegung von 25 Pixel zu erreichen…
Calibration: Fertig
Nach erfolgreicher Kalibrierung springt in der Statuszeile unten rechts der Text “No cal” um in “Cal” und das eigentliche Guiding beginnt…
7. PHD Guiding und Optimierung des Guiding
Nachdem die Kalibrierung erfolgreich durchgeführt wurde geht das PHD in den Status “Guiding” (Nachführen) über. In der Statusleiste unten links erscheint dann der Text “Guiding”…
Das Guiding kann durch diverse Einstellungen beeinflusst werden (s.u.). Beispielsweise will man ja nicht dem Seeing hinterherlaufen; also muss dass Guiding die kleinen schnellen Schwankungen der Luftunruhe ignorieren (siehe Minimum Movement und Guiding Assistant).
Die Qualität des Autoguiding kann man gut im Informationsfenster “Verlauf der Nachführung” (History Graph) s.u. Menü -> Ansicht (View) -> Anzeige Graph (Display Graph) verfolgen.
Falls die Qualität des Autoguiding verbesserungswürdig erscheint, kann man mit diversen Einstellungen (“Settings”) versuchen Einfluss zu nehmen.
Hilfreich kan auch das “Stern-Profil” sein unter: Menü -> Ansicht -> Sternprofil
Im Sternprofil wird das Helligkeitsprofil des ausgewählten Leitsterns angezeigt.
Wenn die Spitze oben in der Mitte nicht spitz, sondern flach ist, wäre der Leitstern zu hell “gesättigt” bzw. “ausgebrannt”.
Die Zahl, die ganz groß angezeigt wird ist der HFD Half Flux Diameter; also der innere Sterndurchmesser, dessen Kreisscheibe 50% des Lichts enthält. Der HFD-Wert ist besser als der früher übliche FWHM-Wert, da er auch bei nicht gut fokussierten Sternen, einen klar definierten Wert liefert. Der HFD-Wert wird extra groß angezeigt, weil man ihn zum Fokussieren des Leitrohres gut aus der Ferne sehen kann (HFD = Min!).
Ebenfalls hilfreich bei ber Beurteilung der Qualität des Auto Guidings kann die sog. “Trefferverteilung” sein:
Welche Fenster aufmachen? Im Menüpunkt “View” können verschiedene Informationsfenster aktiviert werden, z.B.
History
Target
Guide Stats
u.a.
Fenster: History Graph
Einstellungen rechts oben:
Maßstab der x-Achse: x 200
Maßstab der y-Achse: +/- 4″ oder auch 8″
Settings: Arc Seconds (nicht Pixel)
Correction: anhaken (das genau will man ja)
Trend: nicht immer sinnvoll
Unterhalb des Graphen können folgende wichtige Einstellungen vorgenommen werden:
RA aggression: 30
Dec aggression: 30
RA Hysteresis: 15
Dec Hysteresis: N/A
RA MinMo: 0,30 (mit dem Guiding Assistant)
Dec MinMo: 0,30 (mit dem Guiding Assistant)
Scope Max RA=2000, Dec=2000
Dec = Auto/North/South/Off
Guiding Assistant – Nachführassistent
Es wird empfohlen, den sog. Guiding Assistant zu verwenden. Dieser kann aufgerufen werden, nachdem das Polar Alignment vorgenommen wurde, die Verbindungen zu den Geräten hergestellt sind, die Guiding-Kamera eingestellt und ein Guiding-Stern ausgewählt wurde und die Kalibrierung erfolgt ist: d.h. das Guiding ist gerade gestartet. Dann kann man den Guiding Assistant aufrufen (Menü -> Tools -> Nachführassistent), der das Guiding dann erst einmal unterbricht und seine Messungen vornimmt.
Es wird empfohlen, den Guiding-Assistenten so 2-3 Minuten laufen zu lassen; für genauere Messungen sollte man mindestens eine Worm-Periode der Montierung nehmen (HEQ5 Pro: 638,25 Sekunden).
Da die Guiding-Nacht meist etwas hektisch wird, ist es sinnvoll, sich die Feinheiten des erfolgten Guidings in aller Ruhe im nachhinein im sog. Logfile-Viewer anzuschauen und zu analysieren.
Der Ort der Log-Files wird bestimmt durch: Advanced Settings (Brain Symbol) -> Global -> Log File Location
Was ist der sog. Konusfehler (Orthogonalitätsfehler)?
Die Monierung mag ja super gut aufgestellt sein (waagerecht, eingenordet, Goto Alignment) aber trotzdem kann noch ein systematischer Fehler die Goto-Funktion beeinträchtigen. Wenn wir das Teleskop mit Rohrschellen und Schwalbenschwanz-Schiene in die Aufnahme des Polkopfs klemmen, wissen wir ja nicht wirklich, ob nun die optische Achse des Teleskops wirklich exakt parallel zum Achsenkreuz der Montierung ist. Da kann ja eine Abweichung sein. Eine solche Abweichung würde man “Konusfehler” oder “Orthogonalitätsfehler” nennen.
Ein solcher Konusfehler kann leicht bei Reflektoren auftreten z.B. kann durch das Kollimieren die optische Achse verschoben werden. Bei Refraktoren tritt ein Konusfehler selten auf bzw. ist nur sehr klein.
Auswirkungen eines Konusfehlers
Ein Konusfehler kann Auswirkungen auf die Goto-Funktion haben: Wenn man ein Star-Alignment mit Sternen auf einer Seite vom Meridian gemacht hat, wird ein Goto zu einem Objekt auf der andren Seite des Meridians durch einen Konusfeher verfälscht. Wenn man die Meridianseiten welchselt, sollte man einfach noch einmal “SYNCen”.
Bei SynScan-Steuerungen (SkyWatcher) soll soll mit einen 3-Star-Alignment der Konusfehler rechnerisch kompensiert werden….
Verfahren zur Behebung eines Konusfehlers
Einen sehr hilfreichen Beitrag von Dion Heap habe ich beim Astronomyshed auf Youtube gefunden: “Complete Mount and Scope Setup. PART FIVE Cone Error”
Ich will meinen Konusfehler am Tage bestimmen und habe mir als “weit entferntes” Objekt die Spitze des Hamburger Fernsehturms aus gesucht. Der wäre so ca. 812 Meter entfernt.
Vorgehensweise:
ich stelle das Stativ meiner Skywatcher HEQ5Pro waagerecht auf.
Das Stativ richte ich jetzt nicht nach Norden aus, sondern grob auf den Fernsehturm.
Dann löse ich die Klemme der Stundenachse und stelle sie, ausgehend von der “Home-Position” 90 Grad nach rechts so genau bis die Gegengewichtsachse exakt waagerecht liegt. Dann klemme ich die Stundenachse fest. Die genaue waagerechte Position der Gegengewichtsachse messe ich mit eine guten Libelle und meinem elektonischen Nivellieranzeiger.
Nun stelle ich die Spritze des Fernsehturms genau in die Mitte Gesichtsfelds ein und zwar nur durch schwenken in der Deklination (also hoch/runter) oder durch eine Rechts/Links-Bewegung mittels der Azimuthschrauben.
Nun löse ich die Klemme der Stundenachse und schwenke das Teleskop um 180 Grad, von der rechten Seite auf die linke Seite und zwar exakt genau so weit, bis die Gegengewichtstange wieder genau waagerecht zeigt (Libelle/elektronischer Nivellieranzeiger). In dieser Position wird die Stundenachse wieder festgeklemmt.
Nun zeigt das Teleskop ziemlich hoch in den Himmel und ich muss die Spitze des Fernsehturmms wieder genau in die Mitte des Gesichtsfeldes bekommen und zwar nur durch Bewegung in der Deklinationsachse.
Wenn ich die Spitze des Fernsehturms so tatsächlich genau in die Mitte des Gesichtsfeldes bekomme, haben wir keinen Konus-Fehler und sind fertig.
Wenn die Spitze des Fersehturms jetzt nicht genau in der Mittes des Gesichtsfeldes steht, sondern etwas nach links oder etwas nach rechts, muss ich durch justieren der Schalbenschwanz-Aufnahme (s.u.) die Abweichung von der Mitte genau halbieren.
Nach erfolgter Justierung löse ich wieder die Klemmung der Stundenachse und bewege das Teleskop von der linken Position um 180 Grad auf die Rechts-Lage. In der End-Posotion muss die Gegengewichtsachse wieder genau waagerecht liegen.
Dann bewege ich das Teleskop in der Deklination solange bis die Spitze des Fernsehturms im Gesichtsfeld erscheint.
Wenn ich die Spitze des Fernsehturms so tatsächlich genau in die Mitte des Gesichtsfeldes bekomme, haben wir den Konus-Fehler erfolgreich korrigiert und sind fertig.
Wir wiederholen ab Punkt 5 (Teleskop von rechts um 180 Grad nach links schwenken).
Fotos zu Illustration dieser Vorhehensweise
Ausrichtung auf den Fernsehturm
Die Montierung wird nun im Azimut auf den Fernsehturm ausgerichtet. Das kann im Groben durch die Ausrichtung des Stativs erfolgen und im Feinen durch Betätigung der Azimut-Schrauben der Montierung. Mit anderen Worten: Statt wie sonst üblich, die Montierung genau nach Norden auszurichten, wird die Montierung auf die Richtung Fernsehturm in der Links-Rechts-Drehung eingestellt.
Abbildung 1: Blick auf den Fernsehturm (Google Drive: DK_20181208_Konus_133434.jpg), Abbildung 2: HEQ5-Stativ die Nordmarkierung auf den Fernsehturm ausgerichtet (Google Drive: DK_20181211_Konus_120947.jpg)
Das Ziel: Der Hamburger Fernsehturm
Ausrichtung: Der Fernsehturm ist heute mal der “Norden”
Teleskop in Rechtslage
Abbildung 3: Die Montierung mit Gegengewicht links (Google Drive: DK_20181211_Konus_123540.jpg), Abbildung 4: Erstes Foto des entfernten Objekts (Google Drive: DK_20181211_Konus_0401_ISO200_1-500s__28C Rechts.jpg)
Gegengewichtsstange horizontal links
Konusfehler: Teleskop rechts
Teleskop in Linkslage
Abbildung 5: Die Montierung mit Gegengewicht rechts (Google Drive: DK_20181211_Konus_123859.jpg); Abbildung 6: Foto des entfernten Objekts (Google Drive: DK_20181211_Konus_0401_ISO200_1-500s__28C Links.jpg)
Gegengewichtsstange horizontal rechts
Teleskop in Linkslage
Die Spitze des Fernsehturms ist jetzt links von der Mitte, also hat das Teleskop einen leichten Konusfehler.
Das Gesichtsfeld ist 2,6 x 1,8 Grad (f=510mm auf APS-C-Sensor). Die Abweichung ist also ca. 0,40 Grad.
Korrektur des Konusfehlers
Zur Korrektur dieses Konusfehlers müssen wir die Schwalbenschwanzschiene (Vixenschiene) um die Hälfte dieses Betrags, also um 0,20 Grad, in die richtige Richtung bewegen.
Meine Schwalbenschwanzschiene hat keine Justierschrauben für den Konusfehler (wie es die SkyWatcher-Schiene standardmäßig hat), also muss ich mit Unterlegscheiben arbeiten:
Die Befestigungsschrauben zu den Rohrschellen haben einen Abstand von 17 cm. Um auf 17 cm eine Korrektur von 0,20 Grad zu erreichen ist eine Unterlegscheibe folgender Dicke erforderlich:
0,20 * (PI() * 170mm)/180 = 0,59 mm
Abbildung 7: Korrektur mit einer Unterlegscheibe links zwischen Vixen-Schiene und Rohrschelle (Google Drive: DK_20181211_Konus_124138.jpg)
Einjustieren meiner parallaktischen Montierung HEQ5 Pro
Meine parallaktische Montierung, die Skywatcher HEQ5 Pro, hat ja keinen festen Standort, sondern muss jedesmal wenn ich sie aufbaue “richtig” aufgebaut werden.
Zum “richtigen” einstellen gehört:
Stativbeine so einstellen, dass die obere Fläche waagerecht ist (bevor der Polkopf darauf montiert wird
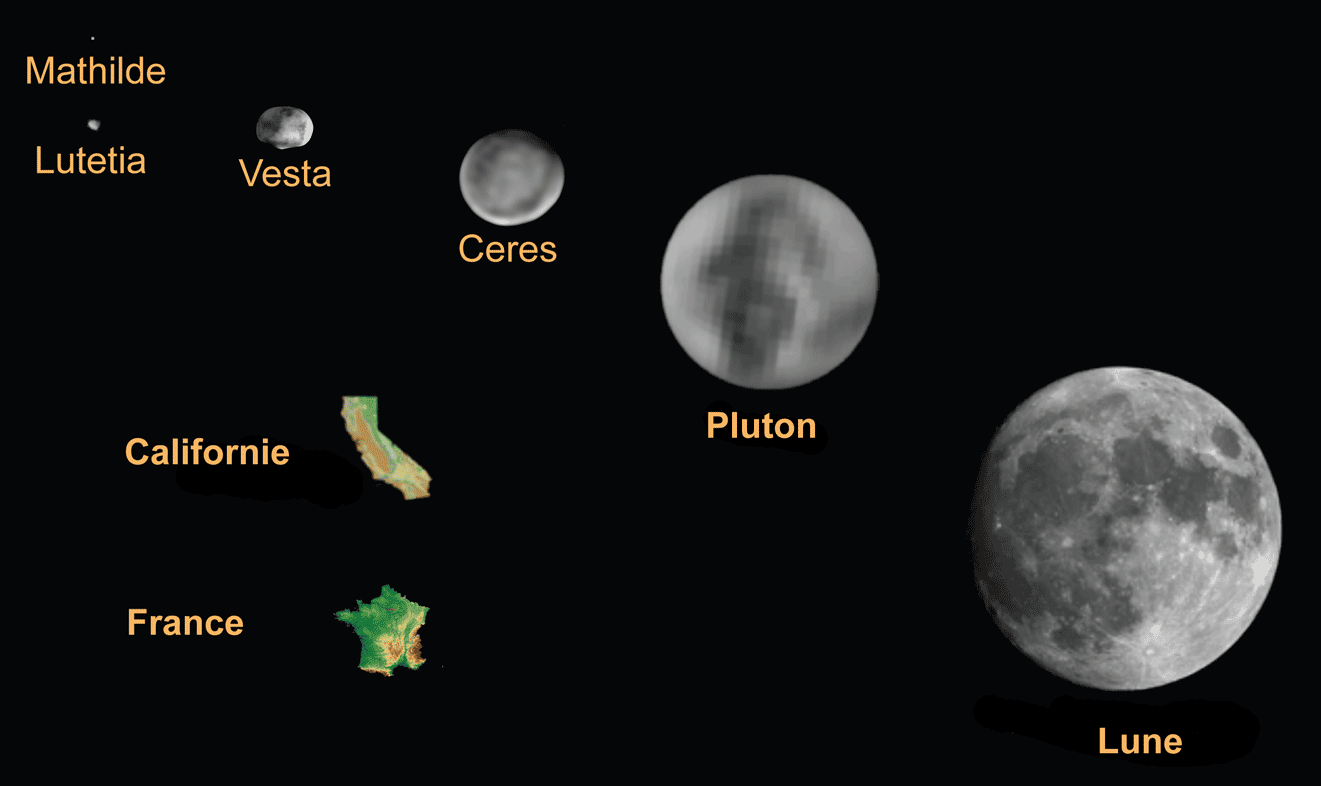
Pluto ereilte ein ähnliches Schicksal wie Ceres. Nach seiner Entdeckung 1930 wurde er als Planet eingestuft und später 2006 dann zum “Zwergplaneten” heruntergestuft.
Abbildung 1: Die Größenverhältnisse von Pluto, Ceres und Vesta etc. (From Wikimedia Commons, the free media repository):
Als weitere Parallele zu Ceres wurde Pluto bei seiner Entdeckung als Einzelobjekt gefunden und erst später erkannte man, dass es eine Vielzahl von ähnlichen Objekten in seiner Ecke des Sonnensystems, die sog. “Transneptunische Objekte” gibt.
Abbildung 2: Die größten Transneptunischen Objekte zeigt (aus WikiMedia)
Die Kleinplaneten: Der Asteroidengürtel im Sonnensystem
Nachdem Wilhelm Herschel 1781 den Planeten Uranus entdeckt hatte, wurde zwischen Mars und Jupiter nach einem Planeten gesucht, was Johann Bode aus Berlin anregte, weil die Titus-Bode-Reihe einen Planeten mit einem Sonnenabstand von 2,7 A.E. vorhersagte.
Titus-Bode-Reihe (in moderner Form, mit Abstand in A.E.):
α = 0,4 + 0,3 * 2n (n= -∞, 0,1,2,3,…)
Für n=3 ergibt sich ein Planet bei α = 2,7 A.E.
Piazzi entdeckte im Januar 1801 tatsächlich ein Objekt, das er zunächst für einen Kometen hielt. Seine Beobachtungsreihe musste er im Februar 1801 wegen einer Krankheit beenden. Erst dann veröffentlichte er seine Beobachtungsdaten. Andere Beobachter konnten das Objekt nicht wieder finden, weil es nun zu nahe an der Sonne stand. Wilhelm Olbers konnte aber aus den Beobachtungen vom Januar und Februar die Bahn berechnen, wobei er die von Karl-Friedrich Gauss entwickelte Methode der kleinsten Quadrate anwenden konnte. Damit konnte das Objekt im Dezember 1801 wieder gefunden werden. Die Bahnberechnungen von Olbers ergaben tasächlich eine große Halbachse von 2,77 A.E. was die Erwartungen voll erfüllte. Das Objekt erhielt den Namen Ceres und wurde, da es ideal in die Titus-Bode-Reihe passte, auch als “Planet” klassifiziert.
Auch die danach in kurzer Reihenfolge entdeckten Pallas (Olbers in Bremen), Juno (Karl Ludwig Harding in Lilienthal bei Bremen) und Vesta (Olbers in Bremen) wurden als Planeten angesehen.
Vesta wurde als vierter Kleinplanet 1807 von Wilhelm Olbers in Bremen entdeckt.
(1) Ceres: 1801 von Giuseppe Piazzi an der Sternwarte Palermo enteckt
(2) Pallas 1802 von Wilhelm Olbers in Bremen entdeckt
(3) Juno 1804 von Karl Ludwig Harding an der Sternwarte Lilienthal entdeckt
(4) Vesta 1807 von Wilhelm Olbers in Bremen entdeckt
Erst nachdem ab 1845 immer mehr solche Objekte entdeckt wurden (Astraea etc.), konnte man diese doch nicht alle als “Planeten” ansehen. Herschel machte den Vorschlag, diese Objekte “Asteroiden” zu nennen (Asteroid = sternenartig), weil er keines dieser Objekte in seinem Fernrohr als Scheibchem auflösen konnte und sie also in Herschels Teleskop “wie Sterne” aussahen.
So wurden Ceres, Pallas, Juno und Vesta vom “Planeten” zum “Asteroiden” degradiert. Viel später wurde Ceres auf Grund der Definition der IAU aus dem Jahre 2006 wieder befördert, diesmal zum “Zwergplaneten“. Die anderen Asteroiden wie Pallas, Juno, Vesta etc. bekamen von der IAU nicht den Status “Zwergplanet”, sondern heissen nun “Small Solar System Bodies“, weil ihre Masse nicht ausreichte, ihre Gestalt durch die Eigengravitation in ein hydrostatisches Gleichgewicht (d.h. eine runde Gestalt) zu bringen.
In der Tat sind die Asteroiden ziehmlich klein, was folgendes Bild veranschaulicht:
Abbildung 1: Größe der Asteroiden (Google Drive: astsizess.jpg)
Nur Ceres hat es in seiner Frühzeit geschafft, eine Kugelgestalt (Rotationsellipsoid) anzunehmen; Pallas, Juno und Vesta sind mehr oder weniger “kartoffelartig”.
Der Kuiper-Gürtel
Am Rande des Sonnensystems gibt es auch noch ein Gebiet in dem sich viele kleinere Körper (“Small Solar System Bodies”) befinden. Dieser Bereich heisst auch “Kuiper-Gürtel“. Der früher auch als Planet eingestufte Pluto gehört auch dazu…
Für das Fotografieren des Planeten Jupiter ist mein Equipment (Teleskop Orion ED 80/600 mit Canon EOS 600Da) eigentlich zu klein. Die Astro-Experten benutzen für die Planeten-Fotografie typischerweise längere Brennweiten mit Video-Kamera und der Technik des “Lucky Imaging“.
Nur um es einmal auszuprobieren habe ich am 15.6.2018 um 17:19 UTC bei meinem Aufenthalt in Namibia auch mal “mein” Teleskop (APM APO 107/700) auf den prächtigen Jupiter gehalten. Dabei musste ich lernen, so kurz zu belichten, dass die vier Jupituer Monde sichtbar werden: 2 sec und ISO 100 mit der Canon EOS 600Da. Dabei ist der Jupiter selbst dann immer noch stark überbelichtet.
Abbildung 1: Jupiter “Beweisfoto” aus Namibia (Google Drive: Jupiter__0149_ISO100_2s__37C_Leo01_4.jpg)
Ausschnitt: Jupiter mit den vier Monden
Am 8.6.2018 kam ich an Teleskop & Computer von Thomas auf “Jupiter Appetit”. Er verwendet anscheinend eine Astro-Kamera “SKYRIS 236C” von “The Imaging Source” und die dafür angebotene Software “iCap”:
Abbildung 2: Jupiter in Namibia (Google Drive: DK_20180608_Kiripotib20.jpg)


{kind=link}
{kind=link}