Diesen Blog-Artikel schreibe ich ausschließlich zu meiner persönlichen Dokumentation; quasi als mein elektronisches persönliches Notizbuch. Wenn es Andere nützlich finden, freue ich mich, übernehme aber keinerlei Garantie für die Richtigkeit bzw. die Fehlerfreiheit meiner Notizen. Insbesondere weise ich darauf hin, dass jeder, der diese meine Notizen benutzt, das auf eigene Gefahr tut. Wenn Produkteigenschaften beschrieben werden, sind dies ausschließlich meine persönlichen Erfahrungen als Laie mit dem einen Gerät, welches ich bekommen habe.
Historie
Geronimo (oder Gerolamo) Cardano (1501-1576) “erfand” komplexe Zahlen als er sich mit der Lösung kubischer Gleichungen beschäftigte (Cardanische Formel 1545). Er ging als Schöpfer der komplexen Zahlen in die Geschichte der Mathematik ein.
Das Symbol i für die imaginäre Einheit als Lösung von x2 + 1 = 0 wurde erstmals 1777 von Leonhard Euler (1707-1783) eingeführt.
Erst Carl Friedrich Gauß (1777-1855) gelang 1831 eine geometrische Interpretation der komplexen Zahlen, indem er sie als Punkte in einer Ebene auffasste und so den Begriff der Gaußschen Zahlenebene prägte.
Im 20. Jahrhundert kam es dann zur praktischen Anwendung der komplexen Zahlen in der Quantenmechanik.
Heutige Grundlagen
Ausgangspunkt ist die berühmte imaginäre Einheit: i2 = -1
Eine komplexe Zahl schreibt man gerne als Realteil und Imaginärteil:
z = x + i*y x = Re(z) und y = Im(z)
Wobei x und y reelle Zahlen sind.
Mit den Komplexen Zahlen kann man auch die vier Grundrechnungsarten, so wie wir sie von den “normalen” d.h. reellen Zahlen her kennen, ausführen – Die komplexen Zahlen bilden, mathematisch gesagt, einen “Körper”.
Zu jeder Komplexen Zahl gibt es die “komplex konjugierte“, die mit gern mit einem Sternchen als Superskript schreibt:
zur komplexen Zahl: z = x + i*y
ist die konjugierte: z* = x – i*y
Manchmal schreibt man die komplex konjugierte auch mit einem Strich über der Zahl. Also:
\( \overline{x + y \cdot i} = x – y \cdot i \)
Jede Komplexe Zahl hat auch einen “Betrag” (kann man sich als Länge vorstellen):
|z|2 = x2 + y2
Interessanterweise ist der Betrag (Länge) einer Komplexen Zahl auch:
|z|2 = z z*
Darstellung der komplexen Zahlen mit kartesischen Koordinaten
Die Reellen Zahlen konnte ich mir ja durch die sog. Zahlengerade gut veranschaulichen. Die Komplexen Zahlen würde ich mir dann durch die Punkte in einer Ebene veranschaulichen.
Polar-Darstellung der komplexen Zahlen
Wenn komplex Zahlen einfach als Punkte in der Ebene verstanden werden können, kann ich sie anstelle von kartesischen Koordinaten, alternativ auch in durch sog. Polarkoordinaten darstellen; d.h. durch die Entfernung vom Nullpunkt r und den Winkel mit der reellen Achse φ.
Damit können wir jede komplexe Zahl auch in sog. Exponential-Darstellung schreiben:
\(\Large z ={r} \cdot e^{i \cdot \phi} \\ \)
Das funktioniert so gut, weil die Multiplikation von Potenzen der Addition der Exponenten entspricht und das mit den Summenformeln der Trigonometrie übereinstimmt.
Den Winkel φ nennt man auch “die Phase”.
Wenn die Komplexen Zahlen den Betrag 1 haben, also auf dem Einheitskreis liegen, hat man:
In der Quantenmechanik wird diese Exponentialdarstellung gerne benutzt, u.a. weil man damit die Multiplikation komplexer Zahlen sehr anschaulich darstellen kann:
Die bahnbrechende Erkenntnis von Kepler war, die Kreisbahnen des heliozentrischen Weltbildes von Nikolaus Kopernikus (1473-1543) durch Ellipsen zu ersetzen. Johannes Kepler konnte dies durch Analyse der Beobachtungsdaten von Tycho Brahe (1546-1601) herleiten; besonders die relativ starke Exzentrizität (0,0934) der Bahn des Planeten Mars brachte Kepler dazu, Ellipsenbahnen anzunehmen. Einen genauen naturwissenschaftlichen Grund dafür konnte Kepler noch nicht angeben.
Kepler ging nicht von gesetzten Voraussetzungen aus (z.B. die Bahnen müssen aus Kreisen bestehen), sondern nur von dem, was beobachtet werden konnte; in diesem Fall von Tycho Brahes genauen Beobachtungsdaten. Kepler konnte daraus die Form der Marsbahn nach jahrelangen Versuchen als Ellipse finden. Voraussetzung dafür war zunächst die genaue Kenntnis der Bahn der Erde um die Sonne, da Tycho ja die Marspositionen relativ zur Erde gemessen hatte. Keplers mathematisches Handwerkszeug war damals fast ausschießlich die Geometrie; deshalb findet man in seiner Veröffentlichung “Astronomia Nova” von 1609 sehr viele geometrische Zeichnungen mit umfangreichen verbalen Erläuterungen.
Tycho Brahe hatte in einem Zeitraum von 20 Jahren sehr genaue Messungen (besser als 1 Bogenminute) der Positionen der Planeten und von ca. 800 Fixsternen gemacht.
Die Fernsehsendung “Johannes Kepler, der Himmelsstürmer” im Sender arte am 08.08.2020 beleuchtete das geniale Werk von Johannes Kepler.
Die Exzentrizität einer Ellipse ist ein Maß für die Abweichung von der Kreisform und wird definiert durch:
\( \Large e = \frac{r_{max} – r_{min}}{r_{max} + r_{min}} \) (Wobei mit rmin und rmax immer die Entfernungen Sonne-Planet gemeint sind)
Zur Zeit beträgt die Exzentrizität der Erdbahn e = 0,0167 und schwankt mit dem Milankowitsch-Zyklus in T=100.000 Jahren minimal. Die Solarkonstante ändert sich mit vergleichsweise geringem Effekt (~2,4 W/m²). Quelle: https://wiki.bildungsserver.de/klimawandel/index.php/Erdbahnparameter
In Polarkoordinaten kann man die Bahn beschreiben als:
Das zweite Keplersche Gesetz folgt allein aus der Tatsache, dass die wirkende Kraft immer genau in Richtung auf die Sonne gerichtet ist (sog. “Zentralkraft”). Damit muss nämlich der Drehimplus des Systems Sonne-Planet konstant bleiben.
Der Drehimplus des Sytems Sonne-Planet ist bekanntlich:
\( L = m \cdot r \cdot v = m \cdot r^2 \cdot \omega \)
Für die “überstrichene Fläche” A(t) gilt infinitesimal:
Als Beispiel habe ich mal die Bahn der Erde um die Sonne schematisch dargestellt. Das Produkt Bahngeschwindigkeit (v) mal Entfernung Erde-Sonne (r) ist proportional zum Drehmoment.
Abbildung 3: Schematische Darstellung der Bahn der Erde um die Sonne (pCloud: Ellipse.svg)
Schematische Darstellung der Bahn der Erde um die Sonne
Das dritte Keplersche Gesetz
Das “Dritte Keplersche Gesetz” bezieht sich nicht auf die Umlaufbahn eines Planeten, sondern setzt die Umlaufbahnen zweier Planeten zueinander in Beziehung, die sich um den gleichen Zentralkörper in Ellipsen bewegen (eventuelle Störungen durch weitere Körper vernachlässigen wir dabei).
Hier geht Kepler also schon (impliziet) von einem heliozentrischen Weltbild aus (Kopernikus).
Die Quadrate der Umlaufszeiten verhalten sich wie die Kuben der mitteren Entfernung. Als Formel also:
Durch Messung der (siderischen) Umlaufszeit eines Planeten könnten wir so also die Gr0ße Halbachse seiner Bahn bestimmen.
Das Dritte Keplersche Gesetz sagt damit etwas aus über den Zentralkörper: die Sonne. Wenn wir ein wenig vorgreifen, ist es die Masse des Zentralkörpers (M), die wir aus der Bahn eines umlaufenden Himmelskörpers bestimmen können; nach der Formel:
Schritt für Schritt kommen wir so zu diesem Ergebnis:
Wenn man die Umlaufszeit eines Planeten um die Sonne mit T bezeichnet und die große Halbachse seiner Bahn um die Sonne mit a, so kann man dieses Gesetz formelmäßig wie folgt formulieren:
\( \frac{a^3}{T^2} = const. \)
Die Gravitationskraft (Anziehungskraft) muss immer genau der Zentripedalkraft in der Planetenbahn entsprechen. Also:
\( F = G \frac{m \cdot M}{r^2} = m \cdot \frac{v^2}{a} \)
Die Masse des Planeten m kürzt sich heraus:
\( G \frac{M}{r^2} = \frac{v^2}{a} \)
Die Bahngeschwindigkeit v erhalten wir als:
\( v = \frac{2 \pi a}{T} \)
Wenn wir das oben einsetzen ergibt sich:
\( G \frac{M}{a^2} = \frac{4 \pi^2 a^2}{a \cdot T^2} \)
Die Ebene Trigonometrie ist die Lehre von den Dreiecken in der Ebene.
Die Sphärische Trigonometrie ist die Lehre von den Dreiecken auf einer Kugeloberfläche. Solche Dreiecke werden durch Abschnitte von Großkreisen gebildet.
Das Polar-Dreieck auf der Himmelskugel
Zur Umrechnung eines Koordinatensystems in ein anderes zeichnet man sich ein sog. Polar-Dreieck, in dem die “Pole” (“Drehpunkte”) beider Koordinatensysteme vorkommen.
Zur Umrechnung der äquatorialen Koordinaten Deklination (δ) und Stundenwinkel (t) in die horizontalen Koordinaten Höhe (h) und Azimuth (A) wird das sog. Polar-Dreieck wird gebildet durch den Himmelspol (N), den Zenit (Z) und ein Himmelsobjekt (O).
Im Polardreieck sind die Abstände (Bogenlängen):
vom Himmelspol zum Zenit: 90° – φ
vom Himmelspol zum Himmelsobjekt: 90° – δ
vom Zenit zum HImmelsobjekt: z = 90° – h
Im Polardreieck sind die Winkel an den Ecken des Dreiecks:
Winkel am Himmelspol: Stundenwinkel t (oder τ)
Winkel am Zenith: 180° – A (A = Azimuth von Süden)
Abbildung 1: Das Polardreieck (Google Drive: polardreieck.svg)
MIt dem Seiten-Cosinussatz errechnet man den Cosinus der Länge einer Seite aus den Längen der beiden anderen Seiten und dem gegenüberliegenden Winkel:
\(\cos z = \cos (90° – \phi) \cos (90° – \delta) + \sin (90° – \phi) \sin (90° – \delta) \cos t\)
Was schließlich heisst:
\(\sin h = \sin \phi \sin \delta + \cos \phi \cos \delta \cos t \)
Der Cotangens-Satz im Polardreieck sagt:
\( \cos (90° – \phi) \cos t = \sin(90° – \phi) \cot (90° – \delta) – \sin t \cot(180° – A) \)
\( \tan A = \Large\frac{\sin t}{\sin \phi \cos t – \cos \phi \tan \delta} \)
MIt Hilfe dieser Koordinatentransformation kann man für jedes bekannte Himmelsobjekt (Deklination und Rektaszension) die scheinbare tägliche Bewegung am Himmel berechnen – siehe dazu: Die scheinbare tägliche Bewegung der Gestirne.
Großkreise auf einer Kugel
Wenn ich im obigen Polardreieck h=0 setze, erhalte ich einen gekippten Großkreis (oBdA setze ich t = λ).
Die kürzeste Verbindung zweier Punkte liegt dann auf einem sog. “Großkreis” (s.o.).
Beispiel 1 (gerade)
Die Strecke von (0.0) nach (π, 0); das ist ein halber Erdumfang am Äquator) müsste eine Länge von π r haben. Da auf der ganzen Strecke φ konstant =0 ist, ist auch dφ = 0 und es ergibt sich als Längenintegral:
\( \Large s = r \int\limits_{0}^{\pi} d \lambda = r \cdot \left[ \lambda \right]_0^\pi = \pi \cdot r\)
Beispiel 2 (gerade)
Die Strecke von (0,0) nach (0, π/2) ist ein Viertel Erdumfang vom Äquator zum Nordpol (ein sog. Quadrant) die Länge müsste also \(r \frac{\pi}{2} \) sein. Da auf der ganzen Strecke λ konstant =0 ist, ist auch dλ=0 und es ergibt sich als Längenintegral:
\( \Large s = r \int\limits_{0}^{\frac{\pi}{2}} d \varphi = r \cdot \left[ \varphi \right]_0^{\frac{\pi}{2}} = r \cdot \frac{\pi}{2}\)
Beispiel 3 (schräg)
Aus dem obigen “Polardreieck” wird das “nautische Grunddreick“, wo wir wieder den Seiten-Cosinussatz anwenden können, um die Distanz zu berechnen. Die Distanz d zwischen einem Ausgangspunkt \( A = (\lambda_A, \varphi_A) \) zu einem Endpunkt \( B = (\lambda_B, \varphi_B) \) können wir also berechnen als:
Wenn wir wissen wollen, wie sich ein Himmelobjekt mit bekannter Rektaszension und Deklination im Laufe des Tages über den Himmel bewegt, so ist die einfache Formel:
Stundenwinkel = Sternzeit – Rektaszension
Deklination = const.
Damit haben wir die äquatorialen Koordinaten Stundenwinkel (t) und Deklination (δ) als Funktion der Sternzeit.
Wenn wir die azimutalen Koordinaten Höhe (h) und Azimut (A) haben wollen, so müssen wir das wie folgt umrechnen:
Das hier betrachtete Qualitätskriterium ist das “Signal-Rausch-Verhältnis” (Signal to Noise Ratio = SNR). Die Qualität von Astro-Fotos wird generell von vielen Faktoren beeinflusst. Darunter sind beispielsweise:
CCD- oder CMOS-Kamera
Farb-Sensor oder Mono-Sensor
Geregelte Kühlung des Sensors (DSLR oder Dedizierte Astro-Kamera oder WebCam oder ?)
Belichtungszeit
Lichtverschmutzung am Beobachtungsort
Fokussierung
Nachführung (z.B. keine, nur Tracking, Autoguiding,…)
Filter
…
Dieser Artikel beschäftigt sich schwerpunktmäßig mit den Belichtungszeiten bei DSO-Aufnahmen und der Frage, wie dafür das Signal-Rausch-Verhältnis verbessert werden kann.
Wie lange sollten die einzelnen Sub-Exposures belichtet werden?
Wir haben ja gelernt, dass wir sehr lange Belichtungszeiten für die so lichtschwachen Objekte (DSOs) der Astrofotografie brauchen.
Lange Belichtungszeit heisst hier aber nicht notwendig, dass ein einzelnes Foto lange belichtet werden muss, sondern wir können auch viele Einzelaufnahmen (Sub Exposures) machen und die dann aufaddieren (Stacken). Es kommt auf die Summe der Einzelbelichtungen an. Man sagt, die gesamte “Integrationszeit” ist das Wesentliche.
Diese Integrationszeit sollte in der Tat lang sein; d.h. mindestens 1 Stunde, besser 2 Stunden, besser 4 Stunden… Die Gesamtzeit (Integrationszeit) kann man ja Planen für die Bobachtungsnacht. Nehmen wir mal an, wir hätten 2 Stunden (also 120 Minuten) angesetzt. Die Frage wäre dann ja, wie lang man jedes Einzelfoto (Sub Exposure) belichten soll. Also ist 120 x 60 sec gut oder 720 x 10 sec oder 24 x 5 min oder… besser?
Quellen
Auf der “Practical Astronomy Show” am 9. März 2019 hat Dr. Robin Glover (SharpCap) dazu einen interessanten Vortrag gehalten. Der Titel des Vortrags war “Deep Sky CMOS Imaging” und er ist als Youtube-Video verfügbar. Youtube:
Ich versuche in diesem Artikel, den Vortrag von Robin Glover nachzuvollziehen und dann zu sehen, wie ich die Schlussfolgerungen auf meine persönliche Situation anpassen kann/muss. Aus diesem Grund bin ich etwas formaler und detaillierter in den Formeln…
Was ist beeinflussbar?
Wenn vieles als gegeben hingenommen werden muss, wie z.B. der Standort (und damit die Lichtverschmutzung), die Kamera (und damit das Kamera-Rauschen, die Kühlungsmöglichkeiten, die Pixelgröße etc.), die nutzbare Zeit am Abend (und damit die Gesamtbelichtungszeit), die Nachführung (keine, Tracking, Guiding,…), dann bleibt als Einflussmöglichkeit im wesentlichen die Entscheidung für die Belichtungszeit der Einzelfotos (Sub Exposures), die zum Gesamtbild zusammengeführt werden sollen (“Stacking”).
Wir gehen die Thematik in folgenden Schritten an
Grundlagen der digitalen Astrofotografie
Was beeinflusst die Qualität von Einzelfotos (Sub Exposures) ?
Wie ergibt sich die Qualität des Summenfotos (gestacktes Bild) ?
Welche Schlussfolgerungen/Empfehlungen ergeben sich daraus für den “Standard Observer”?
Welche Schlussfolgerungen/Empfehlungen ergeben sich daraus für meine persönlich präferierten Beobachtungsorte?
Grundlagen: Signal und Rauschen
Der digitale Sensor – schematisch
Abbildung 1: Elektronische Bauelemente für digitales Fotografieren (pCloud: dslr.svg)
Signalstärke
Auf einem Astrofoto kommen verschiedene Signale zusammen:
Ein Signal vom eigentlichen Beobachtungsobjekt (Nutz-Signal)
Ein zusätzliches Signal vom Himmelshintergrund (Light Pollution)
Ein zusätzliches Signal durch den Dunkelstrom (abhängig von der Sensor-Temperatur)
Die Signalstärke ist eigentlich: Anzahl Photonen pro Pixel pro Sekunde. Das menschliche Auge speichert die Lichtteilchen nicht, der Helligkeitseindruck (die physiologische Signalstärke) wird durch die Anzahl Lichtteilchen pro Zeiteinheit bestimmt. Das Auge hat dabei eine quasi konstante “Belichtungszeit” von so etwa 1/18 Sekunde.
Der Sensor in unserer Kamera hat im Gegensatz zum menschlichen Auge ein beträchtliches Speichervermögen. Daher ist die Belichtungszeit relevant. Die Photonen schlagen Elektronen aus dem Sensormaterial heraus und diese werden über die Belichtungszeit gesammelt. Die gesammelten Elektronen werden dann gemessen und von einem Analog to Digital Converter (ADC) in eine Zahl umgewandelt (ADU). Die Quantum Efficiency (QE) ist dabei der Prozentsatz von Photonen, der ein Elektron auslöst.
Die Signalstärke im Sensor ergibt sich aus der Signalrate und der Belichtungszeit. Wenn wir die Signalrate messen in Anzahl Elektronen pro Pixel pro Sekunde (e-/Pixel/s), ergibt sich die Signalstärke als:
Signalstärke = Signalrate * Belichtungszeit
Jedes Signal ist mit einem Rauschen behaftet. Die Signale vom Himmelshintergrund und vom Dunkelstrom können wir abziehen; es bleibt das Rauschen von Himmelshintergrund und Dunkelstrom; diese können wir durch Stacking der Light-Frames und Dark-Frames (s.u.) bekämpfen.
Messen von Signal und Rauschen
Ein mit einem digitalen Sensor gemachtes Bild besteht aus vielen Pixeln und jeder Pixel hat einen Helligkeitswert (ADU), den der ADC für das jeweilige Pixel ausgegeben hat.
Als Signal kann man nun den Mittelwert und als Rauschen die Standardabweichung dieser ADU-Werte nehmen. Dies können wir z.B. mit der Software Fitswork folgendermassen messen:
Wir öffnen das betreffende Foto in Fitswork
Wir markieren den zu messenden Bereich durch ziehen mit der rechten Maustaste (bzw. wir messen das ganze Bild)
Rechtsklick öffnet ein Kontextmenü, wo wir “Statistik für den Bereich” auswählen…
In der Astrofotografie definiert man nun das Signal to Noise Ratio (SNR) einfach als:
Es gibt mehrere Beiträge für Rauschen in den Light-Frames (Einzelfotos, Sub Exposures), die sich pro Einzelfoto in bestimmter Art addieren (s. unten):
Kamera-extern hat man
Rauschen im eigentlichen, externen Signal vom Beobachtungsobjekt das sog. Shot Noise (auch Photonenrauschen oder Schrotrauschen genannt)
Rauschen im Signal des Himmelshintergrunds (Lichtverschmutzung etc.)
Kamera-intern hat man (sog. Kamera-Rauschen):
Rauschen durch den Auslese-Vorgang (sog. Read Noise – nur Rauschen, kein Signal)
Rauschen durch Wärme im Sensor (sog. Thermisches Rauschen, also Rauschen im Dunkelstrom-Signal, deshalb auch Dunkelstrom-Rauschen genannt)
Quantisierungsrauschen durch den ADC (dieses ist so gering. dass wir es in dieser Betrachtung komplett ignorieren)
Rauschen bringt feine Details im Bild zum Verschwinden. Deshalb wollen wir das Rauschen insgesamt reduzieren.
Das Rauschen ist meistens zufällig (stochastisch) und kann also dadurch bekämpft werden, dass man viele Aufnahmen macht und die dann mittelt (siehe: Stacken).
Ausser in den Einzelfotos (Light Frames) hat man auch noch Rauschen:
Rauschen in den Dark-Frames
Rauschen in den Flat-Frames
Dieses betrachten wir zunächst ebenfalls nicht.
Zusammenfassung (Executive Summary)
Da die technischen Zusammenhänge doch sehr komplex und vielschichtig sind, hier die “wichtigsten” Erkenntnisse vorweg (für einen gegebenen Standort mit gegebener Lichtverschmutzung):
Die Gesamtbelichtungszeit (Integrationszeit) muss lang sein (z.B. 2 Stunden oder mehr)
Die Belichtungszeit eines Einzelfotos muss immer so gewählt werden, dass im Histogramm weder links noch rechts etwas abgeschnitten (“geclippt”) wird
Die Einzelbelichtungszeit muss nur so groß sein, dass das Einzelbild “hintergrundlimitiert” ist; d.h.
Unter lichtverschmutztem Himmel die Einzelfotos (Subs) kurz belichten (z.B. 30 sec), dann aber ganz viele machen (und man braucht vielleicht gar kein Autoguiding)
Unter dunklerem Himmel können die Einzelfotos schon länger belichtet werden (z.B. 5 min), wenn das Guiding (oder: Autoguiding) das hergibt
Ruhig ISO bzw. Gain hochdrehen, dann wird das Ausleserauschen geringer (bei CMOS Sensoren) – aber der Dynamik-Umfang wird etwas sinken
Das thermische Rauschen ist häufig viel kleiner als Stör-Signale aus anderen Quellen. Deshalb ist extreme Kühlung manchmal garnicht so wichtig.
Folgende Rausch-Anteile werden wir im Folgenden ignorieren:
Das thermische Rauschen im Light-Frame: Durch ausreichende Kühlung des Sensors werden wir es auf 10% der Lichtverschmutzung begrenzen
Das Dunkelstrom-Rauschen im Dark-Frame: Wird reduziert durch das Stacken vieler Dark-Frames zu einem Masterdark
Die verbleibenden Rauschanteile wollen wir durch geeignete Wahl der Belichtungszeiten soweit reduzieren, dass sie unterhalb einer persönlichen Qualitätsgrenze liegen. Dabei werden wir die Größe der Lichtverschmutzung als Massstab nehmen.
Das Ausleserauschen (Read Noise) wird irrelevant, wenn wir die Subs so lange belichten, das sie quasi “hintergrundlimitiert” werden; soll heissen dass im gestackten Bild das Ausleserauschen maximal 5% der Lichtverschmutzung ausmacht.
Das “Shot Noise” (Photonen-Rauschen) wird reduziert durch das Stacken vieler Light-Frames
Mit “Hintergrund” meint man die Himmelshelligkeit (Lichtverschmutzung, Airglow etc.). Unter “limitiert” durch den Hintergrund meint man, dass man nicht länger belichten sollte da bei längerer Belichtung die Lichtverschmutzung dominieren würde. Bleibt man knapp unter dieser Grenze so sind die anderen Rausch-Signale (Auslese-Rauschen und thermisches Rauschen) deutlich kleiner sind als das Signal vom Himmelshintergrund und sie können damit vernachlässigt werden. Effektiv ergibt also der Himmelshintergrund das Limit für die Belichtungszeit.
Wenn man sich nach der “optimalen” Belichtungszeit für die Subs fragt, reicht es, wenn man gerade so lange belichtet, dass die Subs hintergrundlimitiert sind. Dann wird durch noch längere Belichtungszeiten das Signal-Rausch-Verhältnis im Stack (Summenbild) nicht mehr verbessert.
Signalkomponenten im Einzelfoto
Wir haben folgende Signalkomponeten in jedem Einzelfoto (Sub Exposure):
Signal vom eigentlichen Himmelsobjekt (ObjektSignal)
Signal vom Himmelshintergrund (LightPollutionSignal)
Signal vom Dunkelstrom
Wie addieren sich die Signalkomponenten im Einzelfoto?
Unahhängige Signale, die über die Zeit prinzipiell gleich bleiben, addieren sich “normal”.
\((1) \hspace{1 em} S_{1+2} = S_1 + S_2 \)
Addieren wir alle Signale, die wir in unserem Einzelfotos haben kommen wir zu einem Gesamtsignal (ImageSignal) von:
Das Himmelsobjekt, welches wir fotografieren, sendet einen Strom von Photonen, die über unsere Optik auf den Pixeln des Kamera-Sensors landen und dort als Elektronen über die Dauer unserer Belichtungszeit gesammelt werden. Durch die Ausleseelektronik der Kamera erhalten wir dann pro Pixel einen Zahlenwert für die Helligkeit.
Je nach anvisiertem Objekt kann die “ObjektSignalRate” ganz unterschiedlich sein. Beispiel: Wieviel Photonen fallen vom Andromedanebel pro Sekunde auf ein Pixel meiner Kamera? Vermutlich könnte man aus der Flächenhelligkeit eines Objekts diese “ObjektSignalRate” ermitteln – ähnlich wie im nächsten Abschnitt mit der Lichtverschmutzung…
Signal vom Himmelshintergrund
Die Helligkeit des Himmelshintergrunds hängt von der Lichtverschmutzung am Beobachtungsort ab. Hinzu kämen der Mond, möglicherweise Airglow u.a.
Die Signalrate, gemessen in Anzahl Elektronen per Pixel per Sekunde, hängt zusätzlich von der Optik (Öffnungsverhältnis) und dem Sensor (Mono/Colour, Pixelgröße, Quanteneffizienz) ab.
Wir definieren deshalb einen “Standard-Beobachter” (mit Standard Equipment), um zu vergleichbaren Zahlen zu kommen.
Der Standard-Beobacher sei definiert durch:
Sensor: CMOS, monochrom, 50% QE, Pixelgröße 3,75µ, Temperatur 25 Grad Celsius
Öffnungsverhältnis: f/6
Lichtverschmutzung: Bortle 5
Gesamtbelichtungszeit: 60 Minuten
Die “LightPollutionRate” können wir mit dem “Sky Background Calculator” ermitteln. Link: https://tools.sharpcap.co.uk
Der Kniff dabei ist, die Himmelshelligkeit von Magnituden pro Quadratbogensekunde umzurechnen in Candela pro Quadratmeter (cd/m²). Dann haben wir einfache lineare Zusammenhänge. Die Umrechnung in cd/m² habe ich in meinem Blog-Artikel über SI-Einheiten beschrieben.
Tabelle 1: Signalrate aus Lichtverschmutzung in e- / Pixel /Sekunde (am 24.5.2021 der o.g. Website entnommen)
Bortle 9
16.0 mag
Inner City
Bortle 8
18.0 mag
City Sky
Bortle 7
18.3 mag
Urban
Bortle 6
18.8 mag
Bright Suburban
Bortle 5 19.8 mag Suburban
Bortle 4
20.9 mag
Rural/Suburban
Bortle 3
21.4 mag
Rural
Bortle 2
21.6 mag
typical dark
Bortle 1
21.85 mag
Excellent Dark
f/4
175,25
27,78
21,07
13,29
5,29
1,92
1,21
1,01
0,80
f/5
112,16
17,78
13,48
8,51
3,39
1,23
0,78
0,65
0,51
f/6
77,89
12,34
9,36
5,91
2,35
0,85
0,54
0,45
0,36
f/7
57,23
9,07
6,88
4,34
1,73
0,63
0,41
0,33
0,26
f/10
28,04
4,44
3,37
2,13
0,85
0,31
0,19
0,16
0,13
Dies sind Daten für einen Mono-Sensor mit 50% Quantum Efficiency und 3,75μ Pixelgröße (für den sog. Standard-Observer).
Für einen Colour-Sensor sind diese Zahlen durch 3 zu dividieren.
Unser Standard-Observer hat nach Tabelle 1 also eine Lichtverschmutzung von:
\((4) \hspace{1 em} LightPollutionRate = 2.35 \space Elektronen \space pro \space Pixel \space pro \space Sekunde \)
Das am Sensor gemessene Signal steigt mit der Belichtungszeit:
Das Signal, was der Sensor ohne einkommende Photonen macht, – also “im Dunklen” – kann man sich in einem Dark-Frame betrachten. Darauf werden Hot Pixel und evtl. ein Amp Glow zu sehen sein…
Rauschkomponenten im Einzelfoto
Wir haben folgende Rauschkomponeten in jedem Einzelfoto (Sub Exposure):
Rauschen im Dunkelstrom (ThermalNoise)
Ausleserauschen (ReadNoise)
Schrot-Rauschen (ShotNoise)
Rauschen in der Lichtverschmutzung (SkyNoise)
Wie addieren sich Rauschkomponenten im Einzelfoto?
Unahhängige Rausch-Signale, die sich über die Zeit zufällig (stochastisch) verhalten, addieren sich mit einer “Quadratwurzel” …. R1 + R2 = Wurzel aus (R1 Quadrat + R2 Quadrat)
Wenn wir zwei zufällige und unabhängige Rauschsignale R1=4 und R2=3 addieren, so erhalten wir R1 + R2 = 5
Das bedeutet, dass bei der Addition stark unterschiedlicher Rauschsignale man das schwächere “praktisch” vernachlässigen kann. Z.B. mit R1 = 10 und R2 =1 ergibt sich:
Wir werden sehen, dass wir (unter bestimmten Bedingungen) das Thermische rauschen und das SkyNoise vernachlässigen können.
Thermal Noise (Dunkelstrom-Rauschen)
Im Sensor entstehen Elektronen nicht nur durch die ankommenden Photonen, sondern auch durch Wärme in der Kamera. Das nennt man “Dunkelstrom”. Dieser Dunkelstrom macht ein Dunkelstrom-Signal und ein Dunkelstrom-Rauschen (Thermal Noise). Das Dunkelstrom-Signal kann man durch Dark-Frames vom vom Nutzsignal (Light Frame) abziehen; das Dunkelstrom-Rauschen bleibt aber erhalten. Es ist von der Temperatur und der Dauer der Belichtung abhängig.
Dunkelstrom-Rauschen (Thermal Noise) verdoppelt sich ungefähr bei Temperaturerhöhung um 6,5 Grad Celsius.
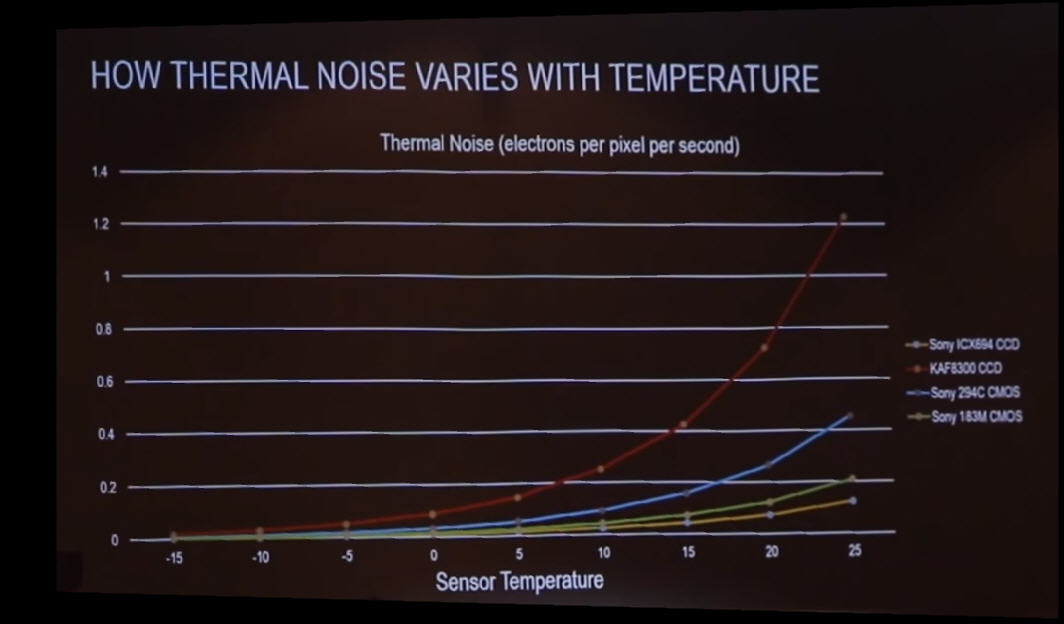
Je nach Sensor ergeben sich unterschiedliche Kurven für dieses Thermal Noise (Copyright Dr. Robin Glover):
Abbildung 2: Dunkelstrom-Rauschen bei verschiedenen Temperaturen (pCloud: RobinGlover-01.jpg)
Typisch für moderne CMOS-Sensoren wie Sony 294C sind 0,2 Elektronen pro Sekunde pro Pixel bei einer Sensor-Temperatur von 25 Grad Celsius. Wenn man diese Kurven sieht, erkennt man, dass ein Herunterkühlen von 25 Grad auf 15 Grad völlig ausreicht, um das thermische Rauschen bedeutungslos (von 0,2 auf 0,1 e–/sec) zu machen.
Bekämpfung: Das thermische Rauschen bekämpfen wir durch Kühlung des Sensors. Robin Glover empfiehlt, das thermische Rauschen auf 10% des Signals der Lichtverschmutzung zu limitieren. Bei besonders geringer Lichtverschmutzung wäre also eine entsprechende leichte Kühlung notwendig. Welche Signalstärke durch Lichtverschmutzung entsteht, ist unten beschrieben.
Erforderliche Kühlung
Um das “Thermal Noise” (das Dunkelstromrauschen) ignorieren zu könnnen, wollen wir dieses auf 10% der LightPollutionRate limitieren. Dazu müssen wir also wissen, wie stark die “LightPollutionRate” ist. Die Himmelshelligkeit an einen bestimmten Beobachtungsort messen wir mit dem Sky Quality Meter (SQM) in Magnituden pro Quadrat-Bogensekunde. Je nach Teleskop und Sensor ergibt sich daraus die “Light Pollution Rate” (in Elektronen pro Pixel pro Sekunde).
Erforderliche Kühlung beim Standard Observer
Light Pollution Rate = 2,35 e- /Pixel / s
Thermal Noise Limit (10%) = 0,235 e- /Pixel /s
Sensor: IMX294
Erforderliche Sensor Temperatur: 17-18 Grad Celsius
Read Noise (Auslese-Rauschen)
Durch den Vorgang des Auslesen der Pixel-Informationen aus dem Sensor entsteht auch ein zusätzliches Rauschen, das sog. Auslese-Rauschen.
Wenn man statt ein paar wenigen Aufnahmen mit längerer Belichtung alternativ viele Aufnahmen mit kürzerer Belichtung macht, hat man auf jeder Einzelaufnahme das Ausleserauschen und das würde also bei “vielen kurzen Belichtungen” viel stärker ins Gewicht fallen. Allerdings ist das Auslese-Rauschen bei modernen CMOS-Kameras sehr gering, wenn man den Gain etwas hoch stellt, was die Dynamik evtl. herabsetzt.
Read Noise bei unterschiedlichem Gain bzw. ISO
Das Aufdrehen des “Gain” bei CMOS-Sensoren ist einfach eine Verstärkung aller Bildsignale.
Das Ausleserauschen (Read Noise) wird durch den Gain allerdings nicht verstärkt, da diese Verstärkung erst nach der Belichtung des Sensors stattfindet (wo genau entsteht das Ausleserauschen?).
Wichtige Kenngrößen des Sensors (Sony IMX294) sind also:
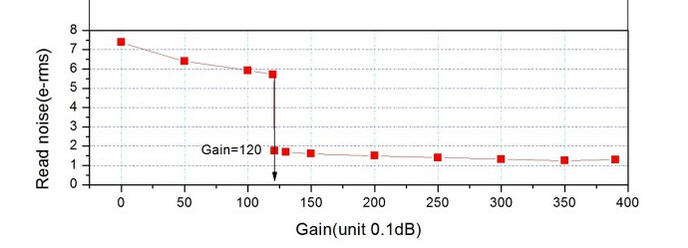
Ausleserauschen (bekommen wir durch Gain 120 auf unter 2.0 e/pix/sec)
Thermisches Rauschen (bei Kühlung auf -10 Grad praktisch Null)
Quantum Efficiency bei 75%
Abbildung 3: Read Noise in Abhängikeit vom Gain bei der ZWO ASI294MC Pro (pCloud: RobinGlover-02.jpg)
Bekämpfung des Ausleserauschens
Das Auslese-Rauschen können wir bei CMOS-Kameras bekämpfen durch Aufdrehen des Gains bis zu dem Punkt, wo das Ausleserauschen stark abfällt (Gain 120 im obigen Beispiel).
Andererseits ist das Ausleserauschen ja unabhängig von allen anderen Einstellungen und fällt eben genau einmal pro Einzelfoto an. Bei gegebener Gesamtbelichtungszeit sollten wir also mit möglicht wenigen Einzelfotos (Sub Exposures) auskommen. Die Belichtungszeit der Subs also soweit hochdrehen, bis “Hintergrundlimitierung” (s. Lichtverschmutzung unten) erreicht ist.
Schlussfolgerung für das Ausleserauschen
Das Ausleserauschen unseres Sensors pro Einzelbild ist ein unvermeidlicher Einflussfaktor; im Beispiel der ZWO ASI 294MC Pro: R = 1,5 e-/pixel/sec
Shot Noise (Schrotrauschen)
Auch im eigentlichen Nutz-Signal haben wir ja ein Rauschen, das sog. “Shot Noise” (im Deutschen auch “Schrotrauschen” genannt) – benannt nach Walter Schottky (1886-1976). Das Shot Noise haben wir weil die Photonen diskrete Teilchen sind, deren Ankommensrate auf einem Pixel zufällig ist und die man mit einer Poisson-Verteilung beschreiben kann.
Wenn wir länger belichten, kommen mehr Photonen auf den Sensor, wenn wir kürzer belichten, kommen weniger Photonen auf den Sensor. Bei einem schwächeren Signal ist das Shot Noise im Verhältnis zum Signal größer (Poisson-Verteilung). Umgekehrt: je länger wir belichten, desto geringer wird das Shot Noise im Verrhältnis zum Signal.
Shot Noise als Funktion des Signals
Das ShotNoise hängt von der Stärke des ObjektSignals ab, welches seinerseits durch die Helligkeit des Objekts und die Dauer der Belichtung gegeben ist.
Abbildung 4: How Shot Noise varies with Brightness (pCloud: Robin Glover Shot Noise 01.svg)
Shot Noise in Prozent des Signals
Absolut gesehen, steigt das Shot Noise mit der Signalstärke, also der Belichtungszeit.
Aber relativ zum Signal wird das Shot Noise (prozentual) immer geringer:
Abbildung 5: Shot Noise as a Percentage of Brightness (pCloud: Robin Glover Shot Noise 02.svg)
Shot Noise und Lichtverschmutzung
Das Shot Noise lässt die schwächsten (dunkelsten) Stellen im Bild quasi verschwinden. Das dunkelste im Bild ist aber das Signal der Lichtverschmutzung. Wir sollten das Shot Noise also in Relation zum Signal aus Lichtverschmutzung sehen. Unser “Standard Observer” hat (Gleichung (3)) eine Lichtverschmutzung von 2.35 Elektronen pro Pixel pro Sekunde.
In Abhängigkeit von der Belichtungszeit der Einzelaufnahme ergibt sich:
ShotNoise = Wurzel aus Nutzsignal = Wurzel aus (NutzsignalRate * Belichtungszeit) (nach Gleichung (9) und (3))
Das ShotNoise selber hängt ja von der Stärke des Nutzsignals ab. Bei einer Nutzsignal-Rate von 243,36 Elektronen pro Pixel und Sekunde (243,36 = 15,62) kommen wir auf das gleiche Bild wie in Robin Glovers Präsentation.
Abbildung 6: Shot Noise in % der Lichtverschmutzung des Standard Observers (pCloud: Robin Glover Shot Noise 03.svg)
Dieses Bild sagt ja “Einzelbild länger belichten, ergibt weniger Rauschen”. Aber wenn wir das Stacken (s.u.) mit berücksichtigen, wird die Sache etwas anders.
Sky Noise (Rauschen in Lichtverschmutzung)
Das Rauschen in der Lichtverschmutzung ignorieren wir. Wohl aber ist die Stärke des Signals der Lichtverschmutzung ein wichtiger Massstab für die anderen Faktoren.
Summe des Rauschens im Einzelbild
Wenn wir, wie gesagt die Größe des Dunkelstrom-Rauschens (Thermal Noise) und das Rauschen in der Lichtverschmutzung (Sky Noise) vernachlässigen, da sie klein gegenüber den anderen Rauschkomponenten sind, bleibt also das Gesamt-Rauschsignal im Einzelbild, das “SingleFrameImageNoise” als Summe aus ReadNoise und ShotNoise:
Dabei sehen wir den Einfluss des ReadNoise (Ausleserauschen) auf das Gesamtrauschen, nur bei kürzeren Belichtungszeiten. Bei längeren Belichtungszeiten verschwindet der Einfluss des ReadNoise ganz schnell. Um das in der Grafik sichtbar zu machen, müssen wir einen ganz anderen Massstab auf der x-Achse (Belichtungszeit) wählen.
Das ShotNoise ist \( ShotNoise = \sqrt{SignalRate} \cdot \sqrt{t} \)
Um das gleiche Bild wie in Robin Glovers Vortrag zu kommen, nehmen wir: SignalRate = 2 Elektronen per Pixel per Sekunde
Das ReadNoise hängt von der verwendeten Kamera ab. Wir nehmen für unsere Grafik mal ein paar typische Werte an:
typische CCD-Mono-Kamera habe ein Ausleserauschen (ReadNoise) von 7 Elektronen pro Pixel pro Sekunde
typische CMOS-Kamera habe ein Ausleserauschen (ReadNoise) von 2.5 Elektronen pro Pixel pro Sekunde
eine “ideale” Kamera ohne ReadNoise, also Null Elektronen pro Pixed pro Sekunde
Dann ist bei der typischen CCD-Mono-Kamera (R=7) und einer Belichtungszeit von t das Gesamtrauschen im Einzelbild:
Abbildung 7: Single Frame Noise als Prozentsatz vom Signal der Lichtverschmutzung (pCloud: Robin Glover Noise 04.svg)
Stacking
In der Astrofotografie nehmen wir viele kürzer belichtete Fotos eines Objekts auf (sog. Sub Exposures oder Frames) und legen diese dann übereinander sog. Stacking, Dabei addieren sich die Signale in verschiedener Weise.
Signal und Rauschen beim Stacking
Beim Stacken von Einzelaufnahmen (Sub Exposures) verhalten sich Signal und Rauschen unterschiedlich.
Konstante Signale, bei denen sich die Signalstärke von Sub zu Sub eigentlich nicht ändert, addieren sich einfach.
\((12) \hspace{1 em} S = S_1 + S_2 + S_3 + … \)
Rausch-Signale, die sich von Sub zu Sub zufällig (stochastisch) ändern, addieren sich mit der “Quadratwurzel”
Andererseits nimmt bei zunehmendem Stacking (Anzahl Frames) der Speicherplatz für die Fotos auch linear zu. Beispielsweise bekomme ich eine Gesamtbelichtungszeit von 120 Minuten wenn ich 720 Fotos mit 10 Sekunden mache oder auch bei 60 Fotos mit 120 Sekunden; allerdings benötigt man in ersteren Fall 12 Mal so viel Speicher.
Die Schlußfolgerung für den Standard Observer
Wenn wir einfach einen gegebenen Ort, ein gegebenes Astro-Equipment und eine gegebene Zeit haben, was sollen wir machen?
Dafür gibt es eine Formel. Wobei wir folgende Symbole benutzen:
O = Object Signal Rate in Electrons per Sekunde per Pixel (abhängig von der Objekt-Helligkeit)
R = Read Noise (typisch bei CMOS-Sensoren: 0,2 e pro Pixel)
T = Total Imaging Time
s = Sub Exposure Time
n = Number of Subs \( n = \frac{T}{s} \)
P = Light Pollution Rate in Electrons per Sekunde per Pixel (typisch: 2,6 für unseren Standard Observer mit Bortle=5)
Noise im Single Frame
Wir wollen die Stärke des Rauschens im Einzelfoto ermitteln. Dafür gilt (Thermal Noise durch geeignete Kühlung vernachlässigt, SkyNoise vernachlässigt weil ganz gering):
Wenn wir als Objekt einfach mal ein sehr dunkles Objekt nehmen, was eine ObjectSignalRate (O) hat, die genauso groß ist, wie die Rate der Lichtverschmutzung (P), dann ergibt sich:
Wenn wir als Objekt einfach mal ein sehr dunkles Objekt nehmen, was eine ObjectSignalRate (O) hat, die genauso groß ist, wie die Rate der Lichtverschmutzung (P), dann ergibt sich:
Wenn wir diese “trockene” Formel mal als Grafik darstellen, sehen wir besser, was da eigentlich passiert. Wir gehen von einer Gesamtbelichtungszeit von einer Stunde (3600 Sekunden) aus nehmen unseren “Standard Observer” und stellen dann die Werte für zwei Kameratypen (typische CCD mit 7.0 e Ausleserauschen und eine typische CMOS mit 2.5 e Ausleserauschen) dar:
Abbildung 8: Total Stack Noise in Abhängigkeit von der Einzel-Belichtungszeit (pCloud: Robin Glover Noise 05.svg)
Beim gesamten Störsignal (Rauschen) betrachten wir ja nur noch zwei Anteile: Ausleserauschen und Lichtverschmutzung.
Die Lichtverschmutzung hat an unserem Beobachtungsort eine gegebene konstante Rate. Die Lichtverschmutzung nimmt auf unseren Bildern also propotional der Belichtungszeit zu – dagegen können wir nichts machen.
Das Ausleserauschen haben wir einmal pro Einzelfoto. Also im Idealfall nur genau einmal. Wenn wir die Gesamtbelichtungszeit in mehrere Einzelfotos (Sub Exposures) aufteilen, haben wir das Ausleserauschen addiert für jedes Einzelfoto. Solange das Ausleserauschen sehr klein gegenüber er Lichtverschmutzung ist, können wir es (fast) vernachlässigen. Wenn wir zu sehr vielen Einzelfotos (d.h. sehr kurzen Belichtungszeiten) kommen wird irgendwann das Ausleserauschen relevant werden und schließlich auch deutlich mehr als die Lichtverschmutzung werden.
Wir sehen, dass sich das Total Stack Noise bei gegebener Gesamtbelichtungszeit (hier: 3600 Sekunden) jeweils einem Optimum (Minimum) annähert (im Beispiel: 96,8 bei CMOS und 97,0 bei CCD).
Die Kurven flachen sehr schnell ab, also können wir durchaus mit Sub Exposures arbeiten, die wesentlich kürzer sind und dabei das optimale (minimale) Rauschen nur ganz knapp erhöhen.
Das Minimum-Rauschen ist also für unseren Standard Observer (P=2.6) bei einer Stunde Gesamtbelichtungszeit:
Für unsere typische CMOS-Kameramit R=2.5 ergibt das:
Minimum-Rauschen CMOS = 96.8 e-/Pixel/s
Für unsere typische CCD-Kamera mit R=7 ergibt das:
Minimum-Rauschen CCD = 97.0 e-/Pixel/s
Wenn wir etwa ein 5% höheres Rauschen als das Minimum-Rauschen akzeptieren, landen wir bei Sub Exposures von: einer halben Minute bei CMOS und 3 Minuten bei CCD.
Im Beispiel sind das:
Standard-Beobachter CMOS 23 sec
Standard-Beobachter CCD 174 sec
Als tabellarische Darstellung haben wir:
Tabelle 3: Ergebnisse: Total Noise in the Stack Bortle=5
Die Idee ist nun, das Rauschen bei einer bestimmten (kürzeren) Belichtungszeit “s” in Relation zum erzielbaren Minimum (also ein lang belichtetes Foto) zu setzten.
Wenn man also einen bestimmten Prozentsatz zusätzlichen Rauschens im Bild akzeptieren will, kann man in der obigen Tabelle 3 für den “Standard Observer” ablesen, welche Einzelbelichtungszeiten dann im Minimum einzuhalten sind (damit das Ausleserauschen nicht zu groß wird). Beispielsweise bei 5% akzeptiertem Zusatzrauschen (also insgesamt 105%, entsprechend 1,05) hat man Einzelbelichtungszeiten von 23 bzw. 174 Sekunden.
Wir können das auch ausrechnen, indem wir unsere Formel nach s (Einzelbelichtungszeit) auflösen:
Der Physiker in mir sagt, R (das Ausleserauschen) ist sehr klein. dann ist R2 erst recht klein und kann gegenüber 3600 * P ganz vernachlässigt werden. Wir können danach auch die 3600 herauskürzen und erhalten:
\( s = \frac{R^2}{(TotalStackNoisePercent)^2 \cdot P – P} \)
Wenn wir jetzt das TotalStackNoisePercent als “E” schreiben und P unten ausklammern, erhalten wir:
\( (28) \hspace{1 em} \Large s = \frac{1}{E^2 -1} \frac{R^2}{P}\)
Wenn wir 5% zusätzliches Rauschen akzeptieren, also E = 1,05 dann ist der Vorfaktor:
\( \frac{1}{1,05^2 – 1} = 9,7561 \)
Bei E=5% erhalten wir die Formel:
\((29) \hspace{1 em} S = 10 \cdot \frac{R^2}{P} \)
Schlussfolgerungen für meine präferierten Beobachtungsorte
Meine präferierten Beobachtungsorte
An verschiedenen Orten haben wir ganz unterschiedliche Lichtverschmutzung:
Teleskop ED80/600 mit Reducer – Öffnungsverhältnis: f/6.4
Teleskop: APM APO 107/700 mit Reducer 0,75 – Öffnungsverhältnis: f/4,9
Meine Light Pollution Raten
An meinen Beobachtungsorten ist die Lichtverschmutzung (in SQM) anders als beim angenommenen “Standard Observer” Bortle 5 (SQM=19,8 mag).
Auch habe ich andere Teleskope und andere Kameras bei mir zur Verfügung.
In der Spalte “Imager (QE)” haben wir die Quanten-Effizienz des Sensors angegeben (41% gilt für die unmodifizierte Cannon EOS 600D)
Die Spalte “Light Pollution Signal” wurde berechnet mit dem “Sky Background Calculator”: Link: https://tools.sharpcap.co.uk
Wie sich das Thermische Rauschen durch Kühlung reduziert, ist für jeden Sensor anders.
Die Spalte “Erforderliche Sensor Temperatur” ergibt sich aus Abbildung 2 (s.o.) für den Sensor Sony IMX294.
Mein Ausleserauschen
Das Ausleserauschen unseres Sensors pro Einzelbild ist ein unvermeidlicher Einflussfaktor; im Beispiel der ZWO ASI 294MC Pro: R = 1,5 e-/pixel/sec
Zusammenfassung: Optimale Sub Exposures an meinen Standorten
Bei einer 60 Minuten Gesamtbelichtung habe ich ein den unterschiedlichen Standorten unterschiedliche “optimale” Belichtungszeiten für die Einzelaufname (Sub Exposure),wenn man einen persönlichen Qualitätsanspruch von 5% Zusatz-Rauschen ansetzt.
Tabelle 6: Optimale Einzel-Belichtungszeit
Standort
Lichtverschmutzung SQM [mag/arcsec²]
Teleskop
Kamera
Light Pollution Rate [e-/pixel/s]
Kühlung
Einzel-Belichtungszeit [s]
Eimsbüttel
18,0
f/6,375
ZWO ASI294MC Pro
8,31
+25°
3
Handeloh
21,1
f/6,375
ZWO ASI294MC Pro
0,48
-15°
45
Namibia
21,9
f/4,9
ZWO ASI294MC Pro
0,39
-15°
55
Einzelberechnungen: Optimale Sub Exposures an meinen Standorten
Im Einzelen gehen die hier aufgeführten “optiomalen” Einzel-Belichtungszeiten aus den Tabellen x-y hervor.
Optimale Belichtungszeit in Eimsbüttel (SQM 18,0, P=8,27)
Tabelle 7: Ergebnisse: Total Noise in the Stack in Eimsbüttel
Sub Exposure Length
Total Stack Noise ASI294 MC Pro
Total Stack Noise ASI294MC Pro
[s]
e-/pixel/s
[%]
1
194,6
112,8
2
183,9
106,6
2,64
181,2
105,0
5
177,2
102,7
10
174,9
101,3
20
173,7
100,7
30
173,3
100,4
100
172,9
100,1
300
172,6
100,0
1000
172,6
100,0
3600
172,55
100,0
Mit folgenden Annahmen:
T = 3600 Sekunden
P = 8.27 e-/pixel/s
R = 1,5 e-/pixel/s (ASI294MC Pro, Gain=121)
Optimale Belichtungszeit in Handeloh (SQM 21,1 P=0,48)
Tabelle 8: Ergebnisse: Total Noise in the Stack in Handeloh
Sub Exposure Length
Total Stack Noise ASI294MC Pro
Total Stack Noise ASI294MC Pro
[s]
e-/pixel/s
[%]
1
99,1
238,3
2
76,0
182,7
5
57,9
139,1
10
50,4
121,1
30
44,7
107,5
45
43,7
105,0
60
43,2
103,8
120
42,4
101,9
300
41,9
100,7
1200
41,7
100,1
3600
41,60
100,0
Mit folgenden Annahmen:
T = 3600 Sekunden
P = 0.48 e-/pixel/s
R = 1,5 e-/pixel/s (ASI294MC Pro, Gain=121)
Optimale Belichtungszeit in Kiripotib (SQM 21,9 P=0,39)
Tabelle 9: Ergebnisse: Total Noise in the Stack in Kiripotib
Im Jahr 1900 formulierte Max Planck (1858-1947) sein Strahlungsgesetz und seine Quantenhypothese. Erst um 1925 entwickelte sich daraus eine Quantentheorie/Quantenmechanik, die die physikalische Systeme im Kleinen (z.B. Elementarteilchen, Atome,…). gut beschreibt. Wesentliche Etappen sind:
Thomas Young: Doppelspalt-Experiment mit Licht 1802
Youtube-Video von Sean Carroll: https://youtu.be/dCrbOmBsTRk?feature=shared
Vor der Quantenmechanik hatten wir so bis 1890 eine schöne heile Welt. Die klassische Mechnik mit wenigen kleineren ungelösten Fragen. Dachte man.
Wir hatten Materie und Kräfte. Die Materie bestand aus Teilchen, die Kräfte waren Felder. Man musste also alle Teilchenarten finden und dann die Kraftfelder, die auf sie wirken, um das Verhalten der Teilchen mit Ort und Geschwindigkeit zu beschreiben. Dachte man.
Dann kam aber die Quantenmechanik und wollte statt mit Ort und Geschwindigkeit alles mit Wellenfunktionen beschreiben. so eine Welle hätte aber keinen Ort.
Thomas Young (1773-1829) hat im Jahre 1802, das berühmte Doppelspalt-Experiment mit Licht unternommen. Es zeigt Interferenzmuster, was klar auf den Wellencharakter des Lichts hinweist. Damals war die gängige Lehre noch, dass Licht aus Teilchen besteht.
Das Experiment gehört zu den Schlüsselexperimenten der Physik.
Später hat man dieses Experiment auch mit Materiewellen, z.B. 1957 Claus Jönsson mit Elektronen, durchgeführt.
Das Plancksche Strahlungsgesetz
Max Planck (1858-1947) beschäftigte sich mit die Strahlung eines sog. “Schwarzen Strahlers”. Speziell ging es ihm darum, wie sich in Abhängigkeit von der Temperatur die abgestrahlte Energie über die Wellenlängen hin verteilt. Früheren Formeln zur Verteilung der Energie über die Wellenlängen z.B. von Wilhelm Wien und später von Rayleigh-Jeans waren nur Teilerfolge, da sie nur Näherungen für kleine Wellenlängen bzw. größere Wellenlängen waren.
Über das Plancksche Strahlngsgesetz habe ich eine separaten Blog-Beitrag geschrieben.
Quelle: http://www.quantenwelt.de/quantenmechanik/historisch/schwarze_korper.html
Plancks Quantenhypothese
Häufig hört man, dass aus Plancks Formel angeblich die Aussendung der Energie in sog. Quanten (ganzzahlige Vielfache von h mal ν) folgt. Das kann man aber aus der Formel selbst überhaupt nicht ableiten.
Vielmehr ist es so, dass Planck, nachdem er die Formel formuliert hatte, versuchte sie herzuleiten. Dabei modellierte er (angeblich) die elektromagnetische Strahlung (das Licht) als Teilchen, die sich wie ein Gas verhalten sollten. Die unterschiedlichen Geschwindigkeiten solcher Teilchen modelliert Planck als unterschiedliche Wellenlängen der Strahlung…
Ein solches Teilchen sollte eine von der Frequenz seiner Strahlung abhängige Energie haben. Das ist die zentrale Formel (Quantenhypothese) von Planck: \(E = h \cdot \nu \)
Der Photoelektrische Effekt
Einfacher für mich ist die Erklärung mit dem photoelektrischen Effekt. Nach Einstein (1879-1955) besteht das Licht aus Teilchen mit der Energie \(E = h \cdot \nu \), um den photoelektrischen Effekt zu erklären. Diese Lichtteilchen nennt Einstein Photonen. Allerdings haben die Photonen die Ruhemasse Null und bewegen sich in Vacuum immer mit der konstanten Geschwindigkeit der Lichtgeschwindigkeit c.
Nach Einstein nimmt die Intensität von Licht dadurch zu, dass mehr Photonen mit der gleichen Energie pro Teilchen abgestrahlt werden. Der photoelektrische Effekt wirkt aber erst dann, wenn das einzelne Photon die erforderliche Energie hat, um Elektronen aus dem Basismaterial herauszulösen. Es ist also nicht eine bestimmte hohe Intensität des Lichts erforderlich, sondern eine bestimmte hohe Frequenz, um die Auslösearbeit zu leisten…
Dieses Experiment zeigt den Teilchencharakter des Lichts mit Teilchen der Energie \( E = h \cdot \nu \).
Das Bohrsche Atommodell
Der Erfolg dieser Theorien brachte Niels Bohr (1885-1962) dazu, so eine Quantelung auch für die Enegieniveaus der Elektronen-Orbitale in seinem Atommodell anzunehmen.
Man stellt sich dabei so ein Orbital als eine stehende Welle (s. Wellenfunktion) vor.
Compton-Streuung
Der US-amerikanische Physiker Arthur Compton (1892-1962) machte 1922 das berühmte Experiment zur Streuung von Photonen an Elektronen. Dabei war die Frequnz des gestreuten Lichts kleiner als die Frequenz des eingestrahlten Lichts. Diese Differenz in der Frequenz erklärte er durch die an das Elektron übertragene Energie: \( \Delta E = h \cdot \nu_1 \, – \, h \cdot \nu_2 \)
Dieses Experiment zeigt erneut den Teilchencharakter des Lichts mit Teilchen der Energie \( E = h \cdot \nu \).
Dieser Effekt der Frequenzveränderung ist bei sichtbarem Licht so klein, dass man ihn damals nicht messen konnte. Bei kurzwelligerem Licht (Röntgenstrahlen) ist der Effekt deutlich größer, aber man braucht ein genaues Verfahren zum Messen der Wellenlänge von Röntgenlicht. Letzteres machte Compton mit einem Bragg-Kristall.
Materiewellen
Nun ist aber nicht nur so. dass Wellen Teilchencharakter haben, sondern auch Teilchen können Wellencharakter haben.
Zu diesem sog. Welle-Teilchen-Dualismus habe ich einen separaten Blog-Beitrag geschrieben.
Quantelung
Welche physikalischen Größen sollen den nun “gequantelt” sein; d.h. nur in ganzzahligen Vielfachen einer (kleinen) Elementargröße (=Quanten) vorkommen? Kommt jede physikalische Größe in “Quanten” oder nur bestimmte?
Ich habe in Heidelberg gehört, dass die Quantelung nur für physikalische Größen zutrifft, die konjugiert zu einer periodischen Größe sind. Was immer das heissen mag…
Die Wellenfunktion
Zur Beschreibung quantenmechanischer Systeme (z.B. Photonen, Elektronen,…) verwendet die Quantenmechanik sog. Wellenfunktionen. Das sind komplexwertigen Funktionen, die vom Ortsvektor r und von der Zeit t abhängen können:
\( \Psi(r,t): \mathbb{R}^3 \times \mathbb{R} \to \mathbb{C} \)
Dabei, so sagt man, beinhaltet eine Wellenfunktion alle Informationen, um das betreffene quantenmechanische System zu beschreiben. Die Wellenfunktion selbst ist keine beobachtbare Größe, aber aus der Wellenfunktion lassen sich Wahrscheinlichkeitsdichten für alle denkbaren physikalischen Größen berechnen (mit Hilfe sog. Operatoren).
Wie man zu einem quantenmechanischen System die zugehörige Wellenfunktion findet, ist eine besondere Geschichte, die zur Schrödinger Gleichung führt…
Meine Hauptpunkte dazu:
Wenn man eine Wellenfunktion hat, wie kommt man dann zu den Observablen? Stichworte: Operatoren, Korrespondenzprinzip,…
Wie bekommt man überhaupt die Wellenfunktion zu einem quantenmechanischen System? Stichwort: Schrödinger,…
Die Schrödinger-Gleichung
Die Schrödinger-Gleichung ist eine partielle Differentialgleichung deren Lösungen die Wellenfunktionen des betrachteten quantenmechanischen Systems sind.
Näheres dazu habe ich in einem separaten Blog-Artikel geschrieben.
Die Kopenhagener Deutung
Es war die Frage, was die Schrödingersche Wellenfunktion eigentlich bedeuten sollte…
Messung der Himmelshelligkeit mit dem “Sky Qualtity Meter” von Unihedron
Die Messung der Himmelshelligkeit kann mit einem Messgerät der kanadischen Firma Unihedron erfolgen. Dieses Gerät habe ich mir am 28.10.2018 von Teleskop-Express für EUR 156,40 kommen lassen. Es misst die Leuchtdichte des Himmels in der astronomischen Einheit Größenklassen/Quadratbogensekunden (mag/arcsec2). Die Skala ist umgekehrt, hohe Zahlenwerte bedeuten einen dunklen Himmel.
Die Amerikaner benutzen gern statt mag/arcsec2 die Abkürzung MPSAS für Magnitudes Per Square Arc Seconds.
Abbildung 1: Foto eines Sky Quality Meter. Im Display steht: 11,36 (pCloud: sqm_kl.jpg)
SQM Sky Quality Meter
Anwendungsbereich des SQM-Geräts
Das SQM-Gerät misst eine Helligkeit. Wenn man es auf den Himmel hält, misst es die Himmelshelligkeit. Wenn man es auf einen Baum hält, misst es die Helligkeit des Baums. Man muss das Gerät also schon in die gewünschte Richtung halten.
Wie bei jeder Messung haben wir eine gewisse Schwankung von Einzel-Messungen. Man sollte also immer mehrere Messungen machen und ggf. daraus einen Mittelwert bilden.
Das SQM-Gerät misst nicht wirklich die “Qualität”, sondern die Helligkeit.
Das SQM-Gerät misst auch nicht die Höhe über Normalnull, auch nicht den Luftdruck, auch nicht die Windstärke, auch nicht das “Seeing” – es misst die Helligkeit.
Ich benutze mein SQM-Gerät z.B. um Vergleiche zwischen Beobachtungsorten anzustellen. Z.B. wie dunkel ist der Himmel in Namibia, wie dunkel ist der Himmel in Hamburg-Eimsbüttel, wie dunkel ist der Himmel in Handeloh – immer unter “guten” Beobachtungsbedingungen, also nach Ende der astronomischen Dämmerung, ohne Mond, ohne Wolken, ohne sonstiges Störlicht…
Wenn ich einigermassen dunkle Beobachtungsorte mit dem SQM-Gerät messe, beginnt das interessant zu werden so bei 21,0 und schon kleine Unterschiede im Messwert (Zehntel) machen einen deutlichen Unterschied in der Himmelshelligkeit aus. Der dunkelste Wert, den ich bisher gemessen habe, lag bei 21,99 auf Kiripotib in Namibia.
Frank Sackenheim sagt dazu: Ein Beobachtungsort mit dunklem HImmel ist durch nichts zu ersetzen – ausser durch einen Ort mit noch dunklerem Himmel. Deswegen habe ich verschiedene Beobachtungsorte beschrieben.
Die Bortle-Skala
Eine ausführlichere Beschreibung der Bortle-Skala findet man in meinem Artikel Lichtverschmutzung.
In der Praxis verwendet man auch gerne die sog. Bortle-Skala, die wie folgt definiert wird:
Tabelle 1: Die Bortle-Skala
SQM
Bortle
21.85
1
Excellent dark sky site
21.6
2
Typical dark sky site – natürlicher Himmelshintergrund, Milchstraße bis Horizont sichtbar, Wolken schwarz
21.4
3
Rural sky – Zodiakallicht (im Frühjahr abends, im Herbst morgens) gut sichtbar, Milchstraße, Wolken über Städten am Horizont hell
20.9
4
Rural / Suburban transition – Milchstraße sichtbar mit geringem Kontrast, Wolken im Zenit hell
19.8
5
Suburban sky – Milchstraße im Zenit schwach erkennbar
18.8
6
Bright suburban sky – wenige Sterne, Himmel stark aufgehellt
18.3
7
Suburban / Urban transition
18.0
8
City sky
SQM Masseinheiten
Jonas Schenker schreibt dazu ( http://www.extrasolar.ch/skyqualitymeter.html ):
Der Sky Quality Meter misst die Helligkeit innerhalb eines Kegels (Öffnungswinkel 80 Grad) und berechnet daraus die mittlere spezifische Leuchtdichte Lv (in Magnituden pro Quadratbogensekunde).
Leuchtdichte Lv
Anzeige:
mag / (arcsec)2
SI-Einheit:
cd / m2 = lm / m2 / sterad
Umrechnung:
Wert in cd/m2 = 1.08 * 10^5 * 10^(-0.4*SQM) , mit SQM = Anzeigewert in mag / (arcsec)2
Die Website http://www.clearoutside.com gibt interessanterweise neben der Wettervorhersage auch die Himmelshelligkeit am Beobachtungsort an. Neben der Einstufung in die Bortle-Skala finden wir auch die Himmelshelligkeit in Einheiten von Milli-Candela pro Quadratmeter (mcd/m²).
Abblidung 2: Clearoutside mit Himmelshelligkeiten (pCloud: ClearOutside-03.jpg)
Angeregt von einem Youtube-Video “Top 10 equations that changed to world” wollte ich hier die wichtigsten Errungenschaften der Mathematik und Physik sind darstellen:
Der Lehrsatz des Pythagoras 10
Der Logarithmen (Napier) 9
Differentialrechnung (“Calculus”) und Grenzwerte (Newton, Leibnitz) 8
Das Gravitationsgesetz (Newton) 7
Die komplexen Zahlen (Euler,…) 6
Wellengleichung (d’Alembert) 5
Fourier Transformation 4
Navier Stokes Gleichung – Aerodynamik – 3
Faraday und Maxwell Gleichungen 2
Die Black-Schole-Gleichung – Finanzmathematik 2
Einstein Relativitätstheorie und Schrödinger Quantenmechanik 1
Der Lehrsatz des Pythagoras
Im rechtwinkligen Dreieck mit den Katheten a und b und der Hypotenuse c gilt:
a² + b² = c²
Dies ist die Basis für die Messung von Entfernungen. Hierdurch wird die Geometrie mit der Algebra verbunden.
Auf dieser Basis kann man Entfernungen im Raum (sog. Metriken) mit mathematischen Formeln berechnen; z.B. im drei-dimensionalen Euklidischen Raum:
ds2 = dx2 + dy2 + dz2
In der Kosmologie verwendet man weitergehende Metriken, z.B. die Robertson-Walker-Metrik…
Logarithmen
Vereinfachen der Multiplikation zur Addition z.B. bei komplexen astronomischen Berechnungen….
log(a · b) = log(a) + log(b)
Logarithmische Skalen z.B. bei den Helligkeiten von Himmelsobjekten…
Differentialrechnung
Die Differentialrechnung geht auf Newton (1643-1727) und Leibniz (1646-1716) zurück …
\( \frac{dx}{dy} = \lim \limits_{h \to 0} \frac{f(x+h)-f(x)}{h} \)
Der Begriff des Grenzwerts (des Limes) wurde erst später von Bernhard Bolzano (1781-1848) und Karl Weierstrass (1815-1897) formal eingeführt.
Newton war es, der die Differentialrechnung in die Physik einführte z.B.
Die Anziehungskraft zwischen zwei Massen m1 und m2, die eine Entfernung r voneinander entfernt sind, ist:
\( F = G \cdot \frac{m_1 \cdot m_2}{r^2} \)
Wobei G die sog. Gravitationskonstante ist.
Die komplexen Zahlen
Hierzu habe ich einen separaten Blog-Artikel geschrieben: Komplexe Zahlen
Die Wellengleichung (d’Alembert)
Die Wellengleichung, auch D’Alembert-Gleichung nach Jean-Baptiste le Rond d’Alembert (1717-1783), bestimmt die Ausbreitung von Wellen wie etwa Schall oder Licht.
“Jede” Funktion wir dargestellt als eine Überlagerung von Sinuswellen mit unterscheidlicher Frequenz….
Navier Stokes Gleichung – Aerodynamik
Claude Navier (1785-1836) und George Stokes (1819-1903)
Das ist nicht so einfach…
Faraday und Maxwell Gleichungen
Michael Faraday (1791-1867) und James Clerk Maxwell (1831-1879)
Für das elektrische Feld E gilt:
\(
\nabla \cdot \vec{E} = 0
,
\nabla \times \vec{E} = \Large -\frac{1}{c} \frac{\partial H}{\partial t}
\)
und für das Magnetfeld H gilt:
\(
\nabla \cdot \vec{H} = 0
,
\nabla \times \vec{H} = \Large \frac{1}{c} \frac{\partial E}{\partial t}
\)
Black Schole Gleichung – Finanzmathematik
Fischer Black (1938-1995) und Myron Scholes (1941-)
Einstein Relativitätstheorie und Schrödinger Quantenmechanik
Albert Einstein (1879-1955) und Erwin Schödinger (1887-1961)
Eine der Voraussetzungen zum Verständnis sind sog. Vektorräume.
Vektorräume verfügen über eine Operation, die Addition genannt wird und eine kommutative Gruppe bildet. Weiterhin muss jeder Vektorraum einen Körper von sog. Skalaren haben, mit denen die Vektoren mutipliziert werden können.
Es gibt den Begriff der “Dimension” eines Vektorraumes…..
Besonders interessant ist das sog. “innere Produkt” (engl. Dot Product) zweier Vektoren…
Eine parallaktische Montierung muss als erstes “eingenordet” (resp. “eingesüdet”) werden; d.h. die Stundenachse der Montierung muss genau parallel zur Erdachse ausgerichtet werden damit die Nachführung richtig funktioniert. Das ist dann besonders wichtig, wenn man seine Astrofotos länger belichten will (siehe: Langzeitbelichtung).
Wenn man seine Montierung nicht dauerhaft an einem Standort aufgestellt hat, sondern für jede Beobachtung das Aufstellen und die Einnordung erneut vornehmen muss (also mobil statt statonär) , kommt es schon darauf an, wie schnell, bequem und genau man die Einnordung vornehmen kann.
Wenn man das Teleskop immer am gleichen Ort z.B. auf seiner Terrasse (markiert mit Nagellack) aufstellt, ist die Polhöhe automatisch richtig und das Azimut stimmt auch fast – nur kleine Korrekturen am Azimut sind zu erwarten. In dieser Situation ist nicht einmal eine freie Sicht auf den Polarstern erforderlich…
Vorher stelle ich die Stativbeine so ein, dass sich die Auflagefläche des Polblocks schön in der Waagerechten befindet. Dazu hilft eine Wasserwaage, die ich bei abmontiertem Polkopf oben auf die Stativplatte lege. Die Länge der Stativbeine stelle ich dann so fein ein, dass die Wasserwaage genau horizontal anzeigt. Das Stativ ist dann “im Wasser”, wie manche sagen. Nun wird ein Drehen an der Polhöhenschraube auch wirklich nur die Polhöhe verändern und nicht auch noch das Azimut.
Damit ich bei der späteren genauen Nordausrichtung auch einen guten Spielraum für die Einstellung durch die beiden Azimut-Schrauben habe, löse ich die beiden Azimut-Schrauben maximal und fixiere sie dann ganz leicht symmetrisch in der Mitteposition. Etwas Gleitmittel zwischen Stativ-Oberplatte und Polkopf-Unterseite erleichtert später die feinen Drehungen im Azimut.
Welche Auswirkungen hat eine ungenaue Polausrichtung?
Eine ungenaue Polausrichtung hat negative Auswirkungen auf die Genauigkeit der Nachführung – genauer gesagt auf die Genauigkeit der Nachführung durch die Montierung, also das Tracking.
Je nach dem, welche Art der Nachführung wir benutzen, kann eine Abweichung in der Polausrichtung unterschiedliche Effekte haben:
Nachführung nur durch die Montierung (“Tracking”): Deklinations-Drift und Stundenwinkel-Drift
Nachführung auf Fixstern(e): (z.B. Autoguiding): Bildfeldrotation
Formel für die Deklinationsdrift
Wir nehmen mal eine Abweichung der Stundenachse vom Pol von \(\Delta\phi\) [in Bogensekunden] an, wobei wir und die Kippung der Stundenachse genau nach Süden vorstellen; d.h. wir nehmen eine Azimut-Abweichung von Null an.
Abbildung 1: Deklinationsdrift wegen Abweichung in Polhöhe nach oben (pCloud: PolarAlignment-01.svg)
Ein fiktiver Fixstern genau auf dem Himmelsäquator würde sich pro Zeit-Sekunde um 15 Bogensekunden auf dem Himmelsäquator weiter bewegen.
Die Montierung bewegt das Teleskop (idealerweise) mit genau der gleich Geschwindigkeit, also 15″ pro Sekunde auf einem um den kleinen Winkel \(\Delta\phi\) gegen den Himmelsäquator geneigten Tracking-Großkreis. Dieser Tracking-Großkreis schneidet den Himmelsäquator im Osten (absteigend) und im Westen (aufsteigend).
Nun annehmen wir an, dass der Fixstern zur Zeit Null sich genau auf dem Schnittpunkt dieser beiden Großkreise im Westen befindet, dann wird er eine Sekunde später ein kleines Stück von dem Tracking-Großkreis nach unten abgewandert sein. Dieses kleine Bogenstück ist offenbar:
\( 15″ \sin{\Delta\phi} \) [in Bogensekunden]
Das ist also das Driftstück in einer Sekunde. Ersetzen wir den Sinus noch durch den Winkel im Bogenmaß erhalten wir die Mean Declination Driftrate als:
Der canburytech Formalismus von Edward Simonson berechnet die MDR = Maximale Driftrate in Deklination pro Sekunde (Maximum Declination Drift Rate per second) genau so und berücksichtigt zusätzlich noch die Refraktion.
Messen der Auswirkungen einer ungenauen Polausrichtung
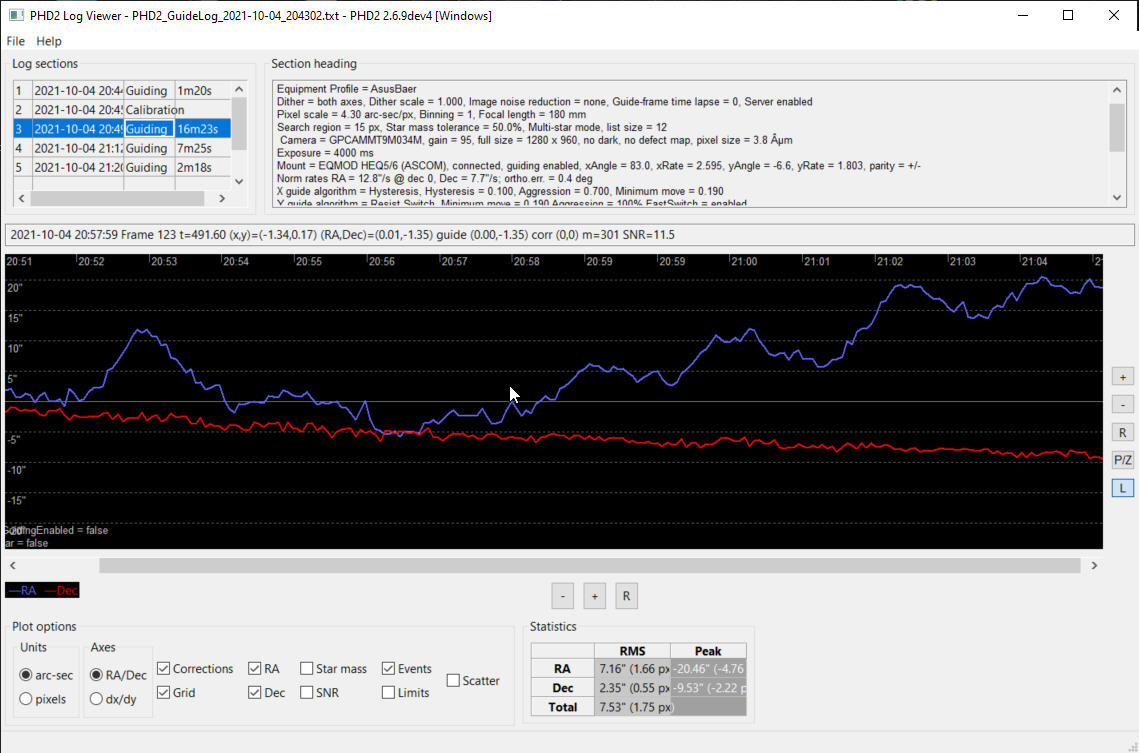
Wenn ich, wie auch immer, eine Polausrichtung vorgenommen habe, kann ich ganz einfach überprüfen, wie gut meine Nachführung damit funktioniert: Ich starte die kostenlose Software PHD2 Guiding und benutze dort den “Guiding Assistant”….
Der Guiding Assistant schaltet das Guiding durch PHD2 ab und verfolgt einfach, was die Nachführung der Montierung (das sog. Tracking) eigentlich macht.
Bevor ich den Guiding Assistant starte, habe ich eine gute Polausrichtung gemacht und per Goto (grob ohne Alignment) ungefähr auf Apheratz (alpha And) positioniert. Dort habe ich PHD2 Guiding gestartet mit Star Selection und Calibration. Danach lasse ich den Guiding Assistant laufen.
Im obigen Beispiel zeigt die rote Kurve, die Abweichung des Trackings in Deklination an. Da haben wir also einen leichten gleichmäßigen Abwärtstrend. Dieser Deklinations-Drift beträgt etwa 0,6 Bogensekunden pro Minute. Das kommt wohl durch einen kleinen Fehler in der Polausrichtung.
Die blaue Kurve zeigt die Abweichungen des Trackings im Stundenwinkel an, wo wir also die Auswirkungen des periodischen Scheckenfehlers vermuten könnten. Aber in unserem obigen Beispiel sieht diese blaue Kurve ja ziemlich schrecklich aus – die Ursachen wären zu ermitteln und. ggf. zu beseitigen. Möglicherweise kann ein Umbau meiner Montierung HEQ5 Pro auf den vielgelobten Riemenantrieb (Rowan Belt Modification) helfen…
Die Auswirkungen der ungenauen Polausrichtung, also Tracking-Abweichungen in Deklination und im Stundenwinkel, können wir “brutal” eliminieren, in dem wir das Autoguiding durch PHD2 wieder anschalten…
Polar Alignment – Welche Genauigkeit ist erforderlich?
Je nachdem, was man eigentlich mit Montierung und Teleskop machen will, ist die erforderliche Genauigkeit beim Polar Alignment ganz unterschiedlich.
Für das “Imaging”, also die Astrofotografie, möchte man ja vermeiden, das die Sterne zu Strichen werden. Da kommt es also auf das Auflösungsvermögen des Teleskops, die Brennweite und die Pixelgröße der Kamera an. Zusätzlich wäre auch noch die Luftunruhe (“Seeing”) zu bedenken. Als Daumenregel sollte die Belichtungszeit einen Drift von maximal ca. 1″ ergeben.
Auf der nördlichen Hemisphäre benutzt man ja gerne den Polarstern (Alpha UMi), um auf den Himmelpol auszurichten. Der Polarstern steht heute (2019) ca. 39 Bogenminuten vom Himmelspol entfernt. Durch die Präzesssion der Erdachse läuft der Himmelspol in 25800 Jahren in einem Radius von 23 Grad um den Pol der Ekliptik. Diese Bewegung macht also 20 Bogensekunden pro Jahr aus.
Bezüglich der erforderlichen Genauigkeit der Polausrichtung kann man unterscheiden:
Visuelle Beobachtungen: da mögen 30 Bogenminuten reichen
Unguided Imaging: da muss die Genauigkeit sehr hoch sein (z.B. 4 Bogenminuten, wenn man 2 Minuten belichten will und die Drift max. 2 Bogensekunden sein darf)
Guided Imaging: da kann die Genauigkeit kleiner sein (weil das Autoguiding fast alle Fehler kompensiert, aber: Bildfeldrotation)
When guiding, as Mark says, in some areas of the sky (close to polaris), I find that polar alignment is much less critical. There is an equation which might be interesting for you. It indicates the accuracy required, depending on where you are looking in the sky:
E = (45000 x S x cosD) / (T x F x A)
\( \Large E = \frac{45000 \cdot D \cdot \cos{(D)}}{T \cdot F \cdot A} \)
Where :
E is the maximum allowable polar misalignment in arcseconds
S is the worst case length of star trails (in microns)
D is the declination of the target in degrees
T is the exposure time in minutes
F is the focal length in mm
A is the angle between the guide star and the target in degrees
Generell setzten wir hier eine parallaktische Montierung voraus.
In jedem Falle ist es hilfreich, zunächst die Monierung gut in die Waagerechte zu bringen (s.o.).
Je nach der erforderlichen Genauigkeit, kann man verschiedene Methoden zur Polausrichtung (Einnorden/Einsüden) einsetzen; wobei unterschiedliche Voraussetzungen gegeben sein müssen und unterschiedliche Hilfsmittel eingesetzt werden.
Grobe Ausrichtung mit Kompass und geografischer Breite
Ausrichtung nach den Himmelspolen (z.B. mit einem Polfernrohr)
Ausrichtung mit “Star Offset” (z.B. Three Point Polar Alignment mit N.I.N.A.)
Scheinern
Methode “Geografisch”
Die Polhöhe meiner parallaktischen Montierung muss auf die geografische Breite des Beobachtungsortes eingestellt werden. Wenn die Montierung dafür keine guten Skalen hat, ist z.B. ein elektronischer Neigungsmesser hilfreich.
Für die genaue Ausrichtung nach Norden (bzw. Süden) kann man einen Kompass benutzen.
Diese “geografische” Methode kann man schon am Tage verwenden und benötigt keine besonderen Hilfsmittel evtl. einen Neigungsmesser und einen Kompass z.B. ein SmartPhone. Dieser Methode ist im Allgemeinen relativ ungenau.
Methode “Himmelspol”
Wenn die Polausrichtung genauer werden soll, verwendet man meist die Methode, den Himmelspol genau zu identifizieren und die Stundenachse der Montierung darauf auszurichten. Dazu ermittelt man die genaue Position des Himmelspols aus bekannten Sternen in der Umgebung des Himmelspols. Dazu muss die Sicht auf den Himmelspol frei sein und die Position der benutzen Sterne relativ zum (unsichtbaren) Himmelpol irgendwie ermittelt werden.
Polfernrohr mit Smartphone-App (z.B. PolarFinder) zur Ermittlung der Position
Polfernrohr mit Kochab-Methode (Hartwig Lüthen) zu Ermittlung der Position
QHY PoleMaster mit Drehen der Stundenachse und Mustererkennung zur Ermittlung der Position
SharpCap Pro mit Platesolving zur Ermittlung der Position
Diese Methoden sind für parallaktische Montierungen ohne Goto-Funktion anwendbar: entweder mit Polfernrohr oder mit zusätzlicher Astro-Kamera (QHY Polemaster, SharpCap Pro). Freie Sicht auf den Himmelspol ist erforderlich. Die Genauigkeit der Polausrichtung kann gute Werte erreichen.
Methode “Star Offset”
Aus den Abweichungen einer Sternposition durch ungenaue Polausrichtung (genannt Star Offset) kann man die erforderlichen Korrekturen in Azimut und Höhe der Stundenachse ausrechnen und so zu einer Einnordung ohne Sicht auf den Himmelspol kommen.
Dies wird Software-mäßig unterstützt beispielsweise durch:
Diese Methode benutzt zwei Sterne, deren äquatorialen Koordinaten bekannt sind (bzw. durch Platesolving ermittelt werden). Die Differenzen in Rektaszension und Deklination sind damit gegeben. Die Montierung kann mit diesem Wissen von Sternposition 1 zu Sternposition 2 schwenken (per Goto). Ein Goto-Alignment ist dazu nicht erforderlich, da die Differenzen benutzt werden. Ein Positionsfehler bei Sternposition 2 (“Star Offset” genannt) ist damit allein auf eine ungenaue Polausrichtung zurückzuführen. Der Fehler in der Polausrichtung lässt sich durch Umrechnung vom äquatorialen Koordinatensystem ins azimutale Koordinatensystem leicht berechnen.
Die erforderliche Korrektur durch manuelles Drehen an den Polhöhenschrauben und den Azimut-Schrauben soll das “Star Offset” (s.o.) auf Null bringen. Ggf. sind diese manuellen Korrekturen widerholt durchzuführen.
Diese Methode ist für parallaktische Montierungen mit Goto-Funktion anwendbar. Man benötigt keine zusätzliche Kamera und auch keine freie Sicht auf den Himmelpol. Die Genauigkeit ist hervorragend. Software-Unterstützung dieser Methode setzt typischerweise ASCOM zur Teleskop-Steuerung (Goto) voraus.
Die klassische (=alte) Methode – zeitaufwendig aber sehr genau…
Man benötigt zwar keine freie Sicht auf den Himmelspol, aber freie Sicht auf den Himmelsäquator im Süden und im Westen oder Osten.
Polar Alignment – Welche Geräte setzen wir zum Polar Alignment ein?
Angenommen, wir haben eine parallaktische Montierung, die wir Einnorden wollen, so können wir unterschiedliche Hilfsmittel für das Einnorden einsetzen:
Meinen QHY PoleMaster habe ich im Januar 2020 gebraucht verkauft. Ich benutze jetzt SharpCap Pro mit meinem vorhandenen GuidingScope. Nach meinem letzten Besuch in Namibia benutze ich N.I.N.A. für das Polar Alignment.
Polar Alignment – Lösungsmöglichkeiten
Für das Einnorden (Einsüden) gibt es verschiedene Methoden. Dazu gehören:
s.u. Einnordung mit Hilfe einer Spezialfunktion der Goto-Montierung (Handbox)
s.u. Einnordung nach der Scheiner-Methode (Drift Alignment)
Weitere Methoden…
Polar Alignment mit N.I.N.A. auf einem Windows-Computer
Für die Astrofotografie bin ich sowieso von APT auf N.I.N.A. gewechselt. Das ist komplett kostenlos und seit Version 2.00 gibt es das geniale Plugin “Three Point Polar Alignment”.
Einzelheiten hierzu habe ich in diesem separaten Artikel beschrieben.
Polar Alignment mit SharpCap Pro auf einem Windows-Computer
Die Software SharpCap Pro, die gerne zum Fotografieren mit Astro-Kameras verwendet wird, hat seit 2019 (kostenpflichtige Pro-Version 3.1) auch eine Funktion “Polar Alignment” die das vorhandene Guiding-Fernrohr verwendet und damit Platesolving macht. Ich habe mir mal die kostenpflichtige Version “Pro” geleistet, um diese neue Funktion auszuprobieren.
Einzelheiten hierzu habe ich in diesem separaten Artikel beschrieben.
Polar Alignment mit dem QHY PoleMaster auf einem Windows-Computer
Der QHY PoleMaster ist 2016 neu auf den Markt gekommen und ermöglicht sehr einfaches und sehr schnelles Einnorden, kostet allerdings so um die 325,– Euro.
QHY Polemaster besteht aus Hardware (eine kleine Mono-Kamera mit Objektiv) und spezieller Software für den Windows-Computer zum leichten Einnorden.
Zum QHY PoleMaster habe ich einen eigenen Artikel geschrieben.
Polar Alignment mit der Software “AlignMaster” auf einem Windows-Computer
Zur Software “AlignMaster” habe ich einen eigenen Artikel geschrieben.
AlignMaster ist eine Windows-Software, die mit Hilfe eines 2-Star-Alignments die Polauswichtung für ASCOM-Menuteirungen und LX200-kompatible erleichtet.
Polar Alignment mit DLSR Logger
Mit der Software DLSR Logger kann ohne freie Sicht auf den Himmelspol (Polaris) einfach anhand von mehreren Fotos auf eine sichtbare Himmelsgegend ein Polar Alignment vornehmen.
Abends um 21:20 soll es mit der Swiss über Nairobi und Zürich wieder nach Hamburg gehen.
Auschecken ist um 12:00 Uhr, was wir mit etwas Hin und Her auf 17:00 Uhr verlängern können (als Kompensation für den verpassten ersten Tag).
Der Bell Captain des Hotels hatte uns für 10:30 einen Guide organisiert, der uns ca. 3 Stunden durch die Stadt führen soll.
Wir sehen von Dar eine ganze Menge, aber der Guide weiss nicht sehr viel über die Hintergründe und es ist ganz schön anstrengend so am Montag mitten durch die wuselige Stadt zu laufen.
Umjoa House
Abbildung 1: Umjoa House (pCloud: Afrika_P1100351.jpg)
Afrika Dar Es Salam Umjoa House
Das Umjoa House wurde für die Vertretung der Europäischen Union gebaut und beherbergt auch die Botschaften von Deutschland, den Niederlanden, Großbritannien etc.
National Museum
Abbildung 2 und 3: National Museum (pCloud: DK_20091012_1100354.JPG und DK_20091012_1100372.JPG)
Afrika Dar Es Salaam: National Museum
Afrika 2009 Dar Es Salaam
Das Nationalmuseum von Tanzania hat einen etwas merkwürdig aussehenden Haupteingang. Das liegt an den zur Zeit stattfindenden Bauarbeiten. Viele interessante Dinge, aber manches auch sehr schlicht gemacht.
Link : http://www.houseofculture.or.tz
Karimjee Hall
Abbildung 4: Karimjee Hall (pCloud: Afrika_P1100387.jpg)
Afrika 2009 Dar Es Salam: Karimjee Hall
1923 erbaut. Nach der Unabhängigkeit 1961 Sitz des “House of Parliament”. Hier wurde auch Julius Nyerere als erster Präsident vereidigt (1962).
Das Parlament (National Assembly – die “Bunge”) wurde 1996 in die neue Hauptstadt Dodoma verlegt. Heute (2009) dient die Karimjee Hall als Veranstaltungsort für Kongresse usw.
Botanischer Garten
Abbildung 5: Botanischer Garten (pCloud: DK_20091012_1100390.jpg)
Afrika 2009 Dar Es Salaam: Botanic Gardens
Gebäude aus der Kolonialzeit
Old City Council Hall von 1903 – Sokoine Drive 18, Ecke Morogoro Road
Old Boma – Sokoine Drive 17, Ecke Morogoro Road – ERbaut 1895-1897 als Amtssitz der deutschen kolonialen Bezirksverwaltung
Lutherische Kirche (1998)
St. Joseph (1897-1902 erbaut)
Ocean Road Hospital 1897
State House – Erbaut 1887 als Gouverneurs Palais, von den Briten zerstört und 1922 als “State House” neu gebaut
Abbildung 8: GPS-Track der Dar Es Salaam Walking Tour (GitHub&OSM: GPS_20091012_0726 Daressalam Walking Tour.gpx)
Duschen und einen Drink an der Poolbar. Vorher müssen wir die Magnetstreifen der Zimmerkarten noch neu kodieren lassen, denn die hatten immer noch 12:00 als Ende-Zeit.
Koffer fertig packen und noch eine Pizza zu zweit am Pool, dann ist die Zeit herum: Beim Auschecken an der Rezeption steht bei den Nebenkosten ein Punkt doppelt drauf. Das Hotel ist aber entgegenkommend und streicht diesen Posten.
Abbildung 9: Hotel Lobby (pCloud: DK_20091012_1100435.jpg)
Afrika 2009 Dar Es Salam: Hotel Moevenpick
Nun müssen wir auf unseren Rovos-Transfer um 18:30 zum Flughafen warten. Zur versprochenen Zeit kommt aber von Rovos kein Mensch. Um 18:40 bestellen wir ein Taxi auf unsere Kosten (30.000 Shilling). Es ist ein gewaltiger Stau auf der Ausfallstraße zum Flughafen. Wir schaffen es aber ganz gut in ca. 1 Std und einer Viertel.
GPX File: GPS_20091012_1545 Taxi Hotel Airport.gpx
Der Taxi Track auf OSM:
Abbildung 10: GPS-Track vom Hotel zum Flughafen (GitHub&OSM: GPS_20091012_1545 Taxi Hotel Airport.gpx)
Ein Gepäckträger bringt unsere beiden großen Koffer zum Business Checkin der Swiss. Wir bekommen die Boardkarten und eine Einladung in die Tazaira Lounge.
Im Flughafen gibt es überhaupt keinen Raucherbereich, das findet Monika überhaupt nicht gut und kann nach einigem Hin und Her eine Speziallösung finden (Foto).
Der Flughafen hat nur einen Abflug-Saal vor dem noch mal ein “Final Security Check” stattfindet.
Das Einsteigen in die Swiss-Maschine (Airbus 330-200) verzögert sich um ca. 20 Minuten. Unsere Sitze sind 10A und B. Die Abmessungen sind für die Business-Klasse OK, aber die Ausstattung der Sitze ist deutlich schlechter als auf dem Hinflug mit der Lufthansa 747.
























{kind=link}