Über die Notwendigkeit der Nachführung bei (etwas) länger belichteten Astrofotos hatte ich ja in einem separaten Artikel geschrieben. Die im Amatuerbereich eingesetzen Montierungen kommen aber beim motorischen Nachführen (sog. Tracking) bei Belichtungszeiten von mehrenen Minuten auch an ihre Grenzen. Da hilft dann das hier beschriebene Autoguiding weiter.
Amateurastronomen, die ich kenne, schwören auf Autoguiding, wenn sie ihre Fotos (Sub-Exposures) länger belichten wollen; z.B. länger als 2 Minuten…
Ich hatte meine Astro-Ausrüstung im Jahre 2016 so ausgesucht, dass auch das sog. Autoguiding möglich ist – obwohl ich damals nicht so recht wusste, ob ich das eigentlich brauchen würde.
Aber ich möchte ja “alles” mal ausprobieren und habe dafür folgendes Equipment:
Meine Montierung ist eine iOptron SmartEQ Pro und verfügt über einen ST4-Port, der ASCOM-Treiber unterstützt aber kein “Pulse Guiding“.
Jetzt (2017) habe ich eine Montierung Skywatcher HEQ5 Pro, die auch einen ST4-Port hat und der ASCOM-Treiber EQMOD unterstützt “Pulse Guiding”.
Als Guiding-Kamera nehme ich meine Altair GPCAM MT9M034M und verfügt ebenfalls über eine ST-4-Schnittstelle zum Autoguiding.
Autoguiding-Lösungen können mit dem Windows-Computer oder ohne Windows-Computer “stand alone” erfolgen.
Computer-Lösung: In aller Munde ist die kostenlose Software “PHD2 Guiding“, die ursprünglich Craig Stark entwickelt hatte.
Stand-alone-Lösung: Eine beliebte Lösung zum Autoguiding ist Lacerta M-GEN
Stand-alone-Lösung: Neu in 2019 kam das StarAid Revolution
ST4 Guiding vs. Pulse Guiding
Klassisch ist das sog. ST4 Guiding. Dazu muss die Montierung einen ST4-Eingang (ST4-Port) haben (haben praktisch alle) und das Guiding-Device (Guiding Kamera oder…) hat einen ST4-Ausgang. Mit einem seriellen Kabel wird kann das Guiding-Device (Guiding Cam oder…) und Montierung verbunden. Die Kamera gibt dann Steuerimpulse zum Guiding an die Montierung. Das ST4 Guding wird beispielsweise bei PHD2 Guiding “On Camera” genannt. Wenn das “Guiding Device” eine schlichte kleine Kamera ist, kann sie die erforderlichen Guiding-Impulse nicht selbst ermitteln, sondern muss dazu eine Software auf dem angeschlosenen Computer bemühen; dieser ermittelt die nötigen Guiding-Impulse und schickt sie an die Kamera, diese schickt sie dann weiter an die Montierung.
Alternative zum ST4-Guiding ist das sog. ASCOM Pulse Guiding. Dabei wird nur die ohnehin benötigte Verbindung zwischen Montierung und Computer benutzt. Die Steuerimpulse zum Guiding werden vom Computer direkt an die Montierung gesendet. Eine Guiding-Software auf dem Computer (z.B. PHD2 Guiding) ermittelt die nötigen Guiding-Impulse durch Auswertung der Bilder von der Guiding-Kamera. Die Guiding-Kamera ist also auch mit dem Computer verbunden.
Die Guiding-Software benutzt also die “normale” ASCOM-Verbindung zur Montierung. Die Verbindung kann in beiden Richtungen benutzt werden: hin zur Montierung werden Guiding-Impulse geschickt, die Guiding-Software kann Daten über die aktuelle Position der Montierung ausgelesen (z.B. die Deklination).
Meine Montierung Skywatcher HEQ5 Pro zusammen mit dem ASCOM-Treiber EQMOD unterstützen dieses “Pulse Guiding”.
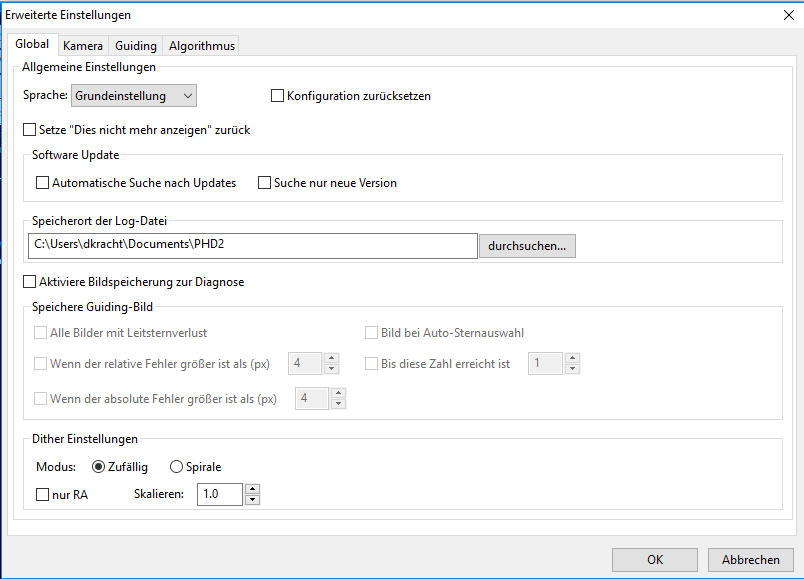
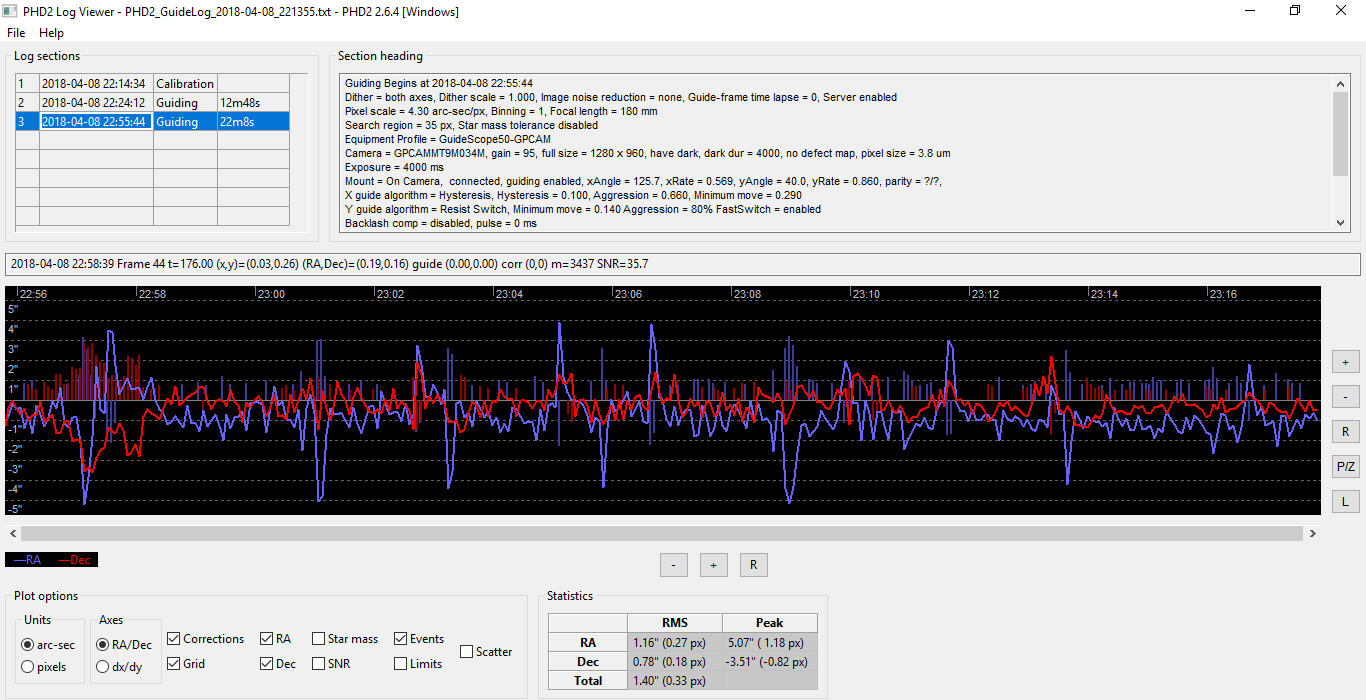
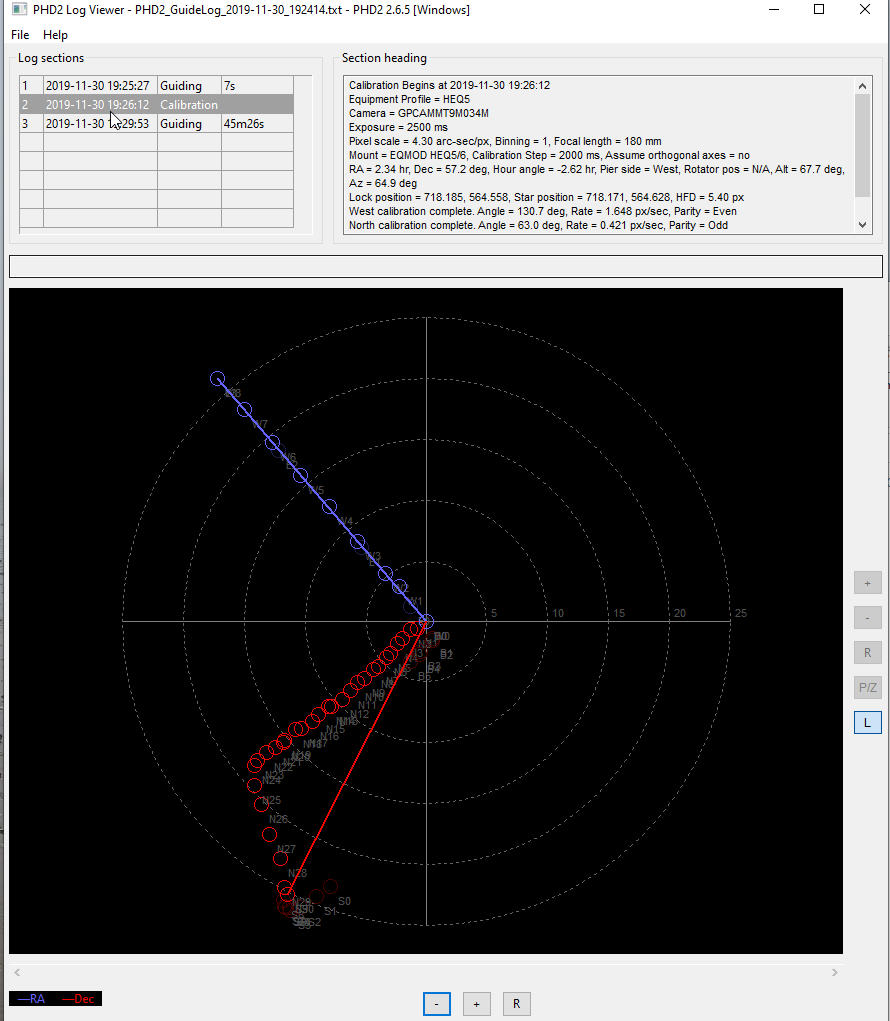
Wenn PHD2 Guiding läuft, schreibt es eine Log-Datei. Während des Guiding scheibt es laufend Guiding-Werte in die Log-Datei. Neben den laufenden Korrekturwerten gehört auch das laufend gemessene SNR dazu.
Erst beim nächsten Start von PHD2 Guiding wird eine neue Log-Datei begonnen.
Mit PHD2 Guiding –> Brain-Symbol (= Erweiterte Einstellungen) -> Reiter “Global” wird Ort dieser Log-Datei eingestellt.
Bei mir ist es: c:\users\dkracht\documents\phd2
In diesen Ordner schreibt PHD2 sein sog. “Guide Log”. Der Dateiname ist: “PHD2_GuideLog_YYYY-MM-DD-HHMMSS.txt”
In der Astrofotografie definiert man nun das Signal to Noise Ratio (SNR) einfach als:
Autoguiding ist garnicht erforderlich, wenn man mit kürzeren Belichtungszeiten für die Einzelaufnahmen arbeitet. Das sehr niedrige Ausleserauschen meiner CMOS-Kamera ZWO ASI294MC Pro lässt ja viele kurze Einzelaufnahmen (je nach Brennweite z.B. 120 x 60 Sekunden), die man zu einem Summenbild stackt, ja prinzipiell zu.
Dann reicht die Genauigkeit der Nachführung (Tracking) durch meine Montierung HEQ5 Pro völlig aus. Voraussetzung ist allerdings, dass die Montierung gut eingenordet ist. Ein Versuch hat bei mir in Hamburg-Eimsbüttel ergeben, dass das Tracking meiner Montierung HEQ5 Pro sogar bei Belichtungszeiten von 240 Sekunden und f=510mm noch so genau ist, dass die Sterne punktförmig abgebildet werden. Ich brauche also in diesem Falle gar kein Autoguiding.
Je nach der Himmelshelligkeit (Lichtverschmutzung) an meinem Beobachtungsort komme ich zu ganz unterschiedlichen maximalen Belichtungszeiten. In der Großstadt liegt das eher bei 120 Sekunden und in Namibia vielleicht bei 15 Minuten.
Bei meiner Aufnahme-Software APT (oder N.I.N.A.) kann ich also ggf. die Verbindung zu PHD2 Guiding abstellen.
Die tatsächliche Genauigkeit des Trackings allein durch die Montierung (also ohne zusätzliches Guiding) zeigt uns sehr schön der Guiding Assistent von PHD2 Guiding (s.u.).
Wenn man tatsächlich ohne Autoguiding arbeiten will, sollte man sich um den Periodic Error seiner Montierung kümmern.
The Lazy Geek: Youtube Video “Understanding Autoguiding”
Nomalerweise sollten die Defaultwerte für alle PHD2-Parameter gut sein (diese Defaultwerte werden vom “New Profile Wizzard” gerätespezifisch auf gute Werte gesetzt).
Was man allerhöchstens ändern sollte sind die Werte für “Minimum Movement“.
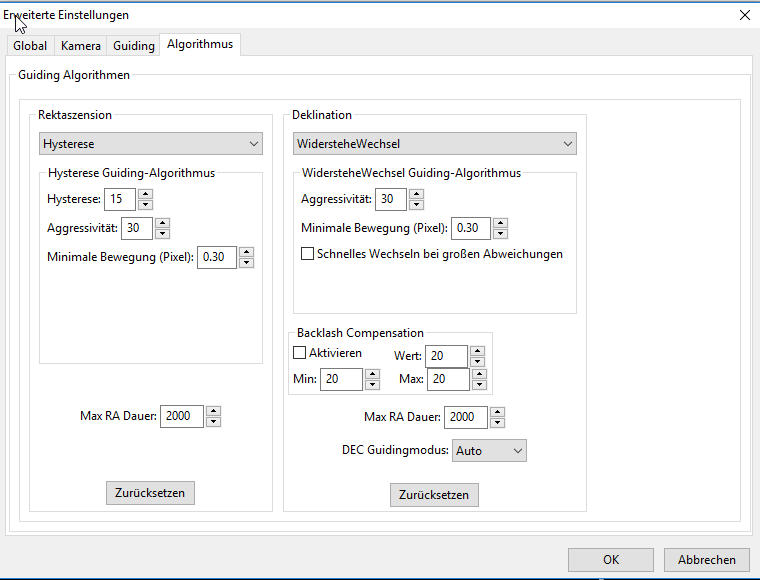
Ansonsten kann man einen “Reset” bewirken auf: Advanced Settings (Brain-Symbol), Reiter “Algorithms”
Polar Alignment
Eine ungenaue Polausrichtung macht sich, wenn Autoguiding gemacht wird nur durch eine Bildfeldrotation bemerkbar.
Diese ist aber bei kleinen Gesichtsfeldern kaum bemerkbar.
Hierfür werden Werte von 0,5 bis 1,0 x Siderial Tracking Speed gehandelt (bei ASCOM-Pulse-Guiding).
PHD2 benutzt diesen Faktor um bei einer Abweichung des Leitsterns vom Sollwert die Länge des erforderlichen Guiding-Impulses zu berechnen.
In Rektaszension (R.A.) bewegt sich die Achse ja schon mit der eingestellten Tracking-Geschwindigkeit (z.B. “Siderial”); das Guiding ändert dann diese eingestellte Tracking-Geschwindigkeit um den Betrag Guiding-Faktor * Tracking Geschwindigkeit.
Beispiele: Guiding Speeds bei verschiedenen Guiding Faktoren – bei Sideriel Tracking = 1.0
Tabelle 1: Guiding Speeds
Guiding Faktor
R.A. Speed östlich
R.A. Speed westlich
1,0
0,0
2,0
0,9
0,1
1,9
0,6
0,4
1,6
0,5
0,5
1,5
PHD2 sendet die errechnete Guiding-Korrektur an die Montierung. Die Montierung führt dann die gesendeten Guiding-Befehle aus.
Was genau PHD2 an Guiding-Information an die Montierung sendet ist verschieden, je nach dem ob ST4-Guiding oder ASCOM-Pulse-Guiding eingestellt ist.
Im Falle von ASCOM-Pulse-Guiding ist der von PHD2 über den ASCOM-Treiber an die Montierung gesendete Befehl: “guide for XXX ms”.
Der Guiding Speed Faktor hat dann wenig Einfluss auf die Qualität des Autoguidings. Man könnte Werte von 0,5 oder höher nehmen.
Im Falle von ST-4-Guiding schickt PHD2 zwei Befehle: “guide” und “guide off” in dem von PHD2 berechneten Zeitabstand an die Guiding-Kammera, die das quasi als Relay weiterleitet über das ST-4-Kabel an die Montierung.
Die Montierung liest die ST-4-Befehle aber im Polling-Verfahren aus; d.h. nur alle soundsoviel Millesekunden. Dadurch kann es bei kürzeren Guiding-Dauern zu Ungenauigkeiten kommen (sog. polling error).
Bei ST-4-Guiding sollten man eine langsame Geschwindigkeit nehmen, damit die Zeitdauer länger ist. Da könnte man einen Faktor von 0,25 nehmen.
Ich hatte meine Astro-Ausrüstung im Jahre 2016 so ausgesucht, dass auch das sog. Autoguiding möglich ist – obwohl ich nicht so recht wusste, ob ich das eigentlich brauchen würde. Zum generellen Punkt der Nachführung habe ich einen separaten Artikel geschrieben.
Aber ich möchte ja “alles” mal ausprobieren.
Meine Montierung ist eine iOptron SmartEQ Pro und verfügt über einen ST-4 Port, der ASCOM-Treiber unterstützt aber kein “Pulse Guiding“.
Jetzt (2017) habe ich eine Montierung Skywatcher HEQ5 Pro, die auch einen ST4-Port hat und den ASCOM-Treiber EQMOD unterstützt mit “Pulse Guiding”.
Die Guiding-Kamera ist eine Altair GPCAM MT9M034M und verfügt ebenfalls über eine ST-4-Schnittstelle zum Autoguiding.
Zum Autoguiding benötigt man einen Computer mit einer Autoguiding-Software. In aller Munde ist die kostenlose Software “PHD2 Guiding“, die ursprünglich Craig Stark entwickelt hatte. Es gibt aber auch sog. “Stand Alone Lösungen” (d.h. ohne Computer) zum Autoguiding z.B. Lacerta M-GEN, StarAid u.a.
Zum Autoguiding mit PHD2 Guiding ist jeder noch so einfache Windows-Computer (oder Laptop oder Nano-Computer) geeignet. Besonders interessant ist es, alle Astro-Software (bei mir: CdC, APT, N.I.N.A., ASPS, PlateSolve2, ASCOM,…) über einen kleinen Windows-Computer laufen zu lassen und dann eine Remote-Steuerung von einem warmen Plätzchen aus vornehmen zu können.
So eine Remote-Steuerung sollte auch mit einem kleinen Linux-Computer, wie z.B. einem Raspberry Pi möglich sein…
Zusammenfassung: Meine Guiding-Parameter
Tabelle 2: Die wichtigsten Parameter auf einen Blick (die Defaultwerte von PHD2 sollten eigentlich reichen):
Parameter
Wo?
Wert
Bemerkung
Auffinderegion
Guiding Tab
15 px
Sterngrößenerkennung
Guiding Tab
50.0
Brennweite
Guiding Tab
180 mm
Kalibrierungsschritte
Guiding Tab
750 ms
berechnet abh. von Dekl.
R.A. Algorithmus
Algorithmus Tab
Hysterese
R.A. Hysterese
Algorithmus Tab
20%
Prozent der vorigen Guiding-Impulse
R.A. Agression
Algorithmus Tab
75%
R.A. Minimum Movement
Algorithmus Tab
0.1 px
R.A. Max. Dauer
Algorithmus Tab
6000
Dekl. Algorithmus
Algorithmus Tab
Widerstehe Wechsel
Dekl Agressivität
Algorithmus Tab
90%
Dekl. Minimum Movement
Algorithmus Tab
0,1 px
Dekl. Max. Dauer
Algorithmus Tab
8000
Dekl. Modus
Algorithmus Tab
Auto
Erste Schritte mit PHD2 Guiding im Überblick
Die Schritte im Überblick:
Installation der Software PHD2 Guiding
Allgemeine Astro-Vorbereitungsschritte (noch ohne PHD2 Guiding)
Verbinden des PCs mit Kamera und Montierung (ggf. Simulationen !!!) — bei zwei Kameras, die RICHTIGE hier auswählen
Live-Bild in PHD einstellen – wichtig: fokussieren
Guiding-Stern auswählen
Kalibrierung – welche Parameter sind für die Kalibrierung wichtig?
Guiding und Optimierung des Guiding
Die Ersten Schritte mit PHD2 Guiding im Einzelnen
1. Installation der Software
Bei der Erst-Installation auf einem meiner Windows-Compter wurde die Datei MSVP120.dll als vermisst gemeldet.
Durch Installation des “Microsoft Visual C++ 2013 Redistributable (x86) 12.0.21005” konnte ich dieses Problem lösen.
2. Vorbereitende Schritte
Jetzt benötigen wir generelle vorbereitende Schritte, die noch ohne die Software PHD2 Guiding erfolgen.
Eine erste grobe Fokussierung mache ich schon am Tage an terrestischen Objekten
Die feine Fokussierung der Guiding-Optik mache ich am besten sofort nach dem Einnorden. Da habe ich einen halbwegs hellen Stern, Polaris, bei dem die Fokussierung leichter möglich sein sollte.
Das Fokussieren mache ich nicht mit der Software PHD2 Guiding, sondern mit der Astrofotografie-Software, die ich auch sonst zum Fotografieren benutze (z.B. SharpCap).
Goto auf das Beobachtungsobjekt z.B. eine Gegend, die für die PHD2 Guiding Kalibrierung geeignet ist.
3. Verbinden der Geräte mit PHD2 Guiding (Kamera und Montierung)
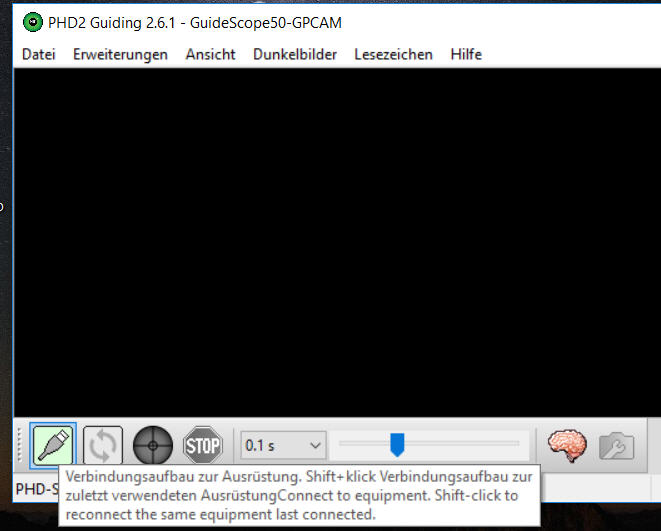
Wenn man PHD2 Guiding startet, muss man zuerst die Geräte (Kamera, Montierung etc.) verbinden. Dazu klickt man in der unteren Leiste auf das erste Symbol von links (Stecker-Symbol). Dort kann man die Geräte einzeln verbinden oder man benutzt den “New Profile Assistant”.
Bei der Kamera ist das klar: Gemeint ist die Nachführkamera, also meine Altair-Kamera GPCAM entweder direkt (d.h. per Windows-Treiber) oder über ASCOM (also ASCOM installieren).
Klicken auf Schaltfläche “verbinden”
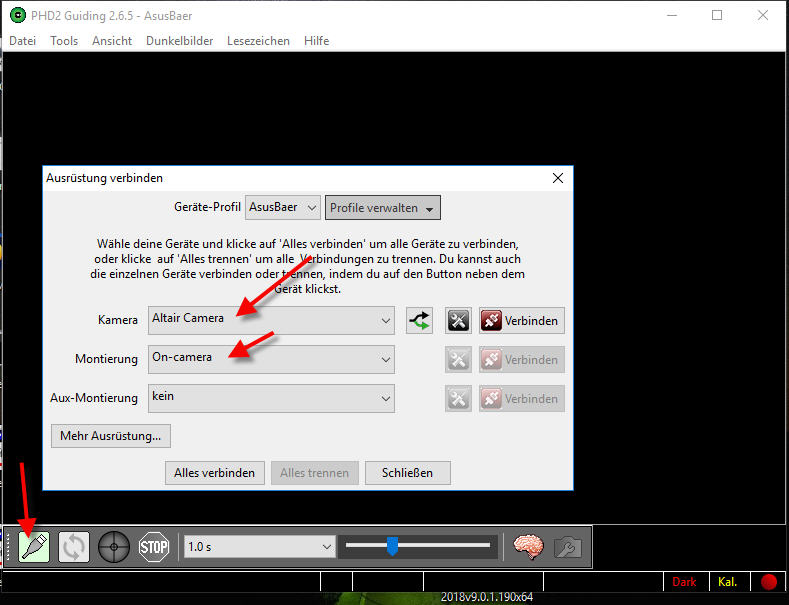
Verbindung zur Montierung
Bei der Montierung kann man schnell einen Fehler machen. Als neu gelerner ASCOM-Fan dachte ich natürlich daran, jetzt den ASCOM-Treiber meiner Montierung auszuwählen. Das ist aber Quatsch, weil ich die Montierung ja schon per ST-4 mit der Nachführkamera verbunden habe. Ich sollte im PHD bei Montierung also auswählen “on camera“, was für mich nicht wirklich intuitiv war. Dies ist also die Vorgehensweise für ein sog. “ST4-Guiding”, alternativ wäre auch ein “ASCOM Pulse Guiding” (wenn die Montierung und der Treiber das denn unterstützt) möglich.
Klicken auf “verbinden”: Nun verbindet sich PHD2 Guiding über den ST-4-Anschluss der Nachführkamera mit dem ST-4-Anschluss der Montierung.
ASCOM Pulse Guiding: Alternativ kann man auch statt der Verbindung per ST-4, die Montierung direkt mit dem Computer per serieller Schnittstelle (bzw. USB) und ASCOM/EQMOD verbinden. Das Kabel zur Montierung benötigt man ja sowieso; also spart man ein Kabel, nämlich das ST4-Kabel) und ermöglicht dem Guiding-Programm Kontakt zur Montierung aufzunehmen um z.B. die Deklination festzustellen, was bei der Kalibrierung wichtig ist.
Vorteile von ASCOM Pulse Guding:
Bei ASCOM Pulse Guiding muss man nur einmal kalibrieren, da PHD2 Guiding die Deklination kennt und entspreched umgerechnet. Bei ST4-Guiding muss bei jedem neuen Zielobjekt zuerst neu kalibriert werden.
Wenn man sowieso Teleskopsteuerung über ASCOM machen will z.B. Goto per Cartes du Ciel, braucht man sowieso eine Verbindung zur Montierung und spart das extra ST4-Kabel ein.
Beim ASCOM Pulse Guiding sendet PHD2 zur Guide-Korrektur nur einen Guide-Befehl mit der Zeitdauer an die Montierung. Das ist meisten genauer als beim ST-4-Guiding, wo ein Start- und ein Stop-Befehl von PHD2 via Guiding-Kamera an die Montierung gesendet wird.
Die von PHD2 Guiding gesendeten Guiding-Befehle und deren Reaktionen werden im Log-File festgehalten und können später analysiert werden. Bei ST4-Guiding weiss PHD2 fast nichts und das Log-File sagt nichts aus.
Verbindungsprofil
Die ausgewählten Verbindungen (zu Kamera und Montierung) sowie die dazu vorgenommenen PHD2-Einstellungen (s.u.) können in einem sog. Profil gespeichert werden.
Zu einem solchen Verbindungsprofil stellt PHd2 Guiding dann spezifische Defaultwerte für die Guiding-Parameter ein.
Dunkelbilder
Nun sollte man sog. Dunkelbilder in eine Bibliothek ablegen…
Dunkelbilder sind z.B. wichtig, wenn PHD2 seinen Guiding-Stern automatisch aussuchen soll; dann sollte PHD2 kein Hot Pixel als Leitstern aussuchen…
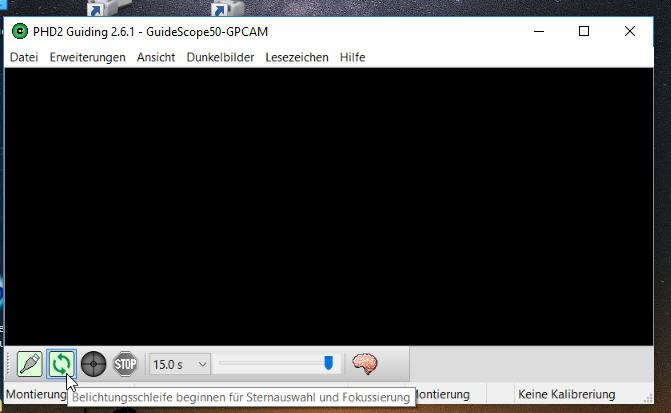
Auf das Loop-Symbol (Zwei Pfeile im Kreis; in der unteren Leiste das zweite Symbol von links) klicken und es erscheinen Bilder der Nachführkamera auf dem Computer-Bildschirm (das Live-Bild).
Am Anfang ist man häufig völlig ausser Fokus; dann sieht man im Live View erst einmal nichts. Man muss mit dem Fokus mal grob hin und her probieren, bis man im PHD-Live-View tatsächlich Sterne sieht, die man dann auch noch mit der Fokusfeineinstellung schön scharf einstellt. Am besten fokussiert man gleich nach dem Einnorden auf den Polarstern – und zwar mit SharpCap.
Eine grobe Fokussierung auf ein weit entferntes terrestrisches Objekt sollte im Vorwege geschehen…
Belichtungszeit und Gamma
Parallel zum Fokussieren muss man eine sinnvolle Belichtungszeit einstellen (so dass man mehrere schöne Sterne auf dem Bildschirm sieht).
Als Camera Exposure (unten im Drop-Down rechts neben dem Stop-Symbol) werden 2,0 bis 4,0 sec empfohlen. Längere Belichtungszeiten sind vorteilhaft bei schlechtem Seeing und längeren Brennweiten, da über die Zeit hinweg gemittelt wird. Meine Einstellung: 3.0 sec.
Rechts neben dem Drop-down für die Belichtungszeit befindet sich ein Schieberegler, der das Gamma für den Bildschirm einstellt: ggf. nach links schieben, um schächere Sterne zu sehen.
Es gibt noch einen sog. “Cam Dialog” das ist das Symbol rechts vom “Gehirn-Symbol”…
5. Guiding-Stern auswählen
Nun wählt man einen Stern durch Anklicken mit der Maus als sog. “Leitstern” aus. Der Leitstern wird von PHD2 mit einem grünen Kästchen umrahmt, der sog. Auffindregion (Anzahl Pixel einstellen im Brain Tab “Guiding”).
Der Leitstern sollte nicht “ausgebrannt” sein, sondern mittel-hell. ggf. Menü –> View –> Display Star Profile
Der Leitstern sollte nicht zu sehr am Rande des Gesichtsfeldes liegen.
Damit man im Live-Bild der Guiding-Kamera möglicht viele Sterne sieht, evtl. das “Gamma” etwas aufziehen…
Anfangs könnte es hilfreich sein, den Leitstern automatisch von PHD2 wählen zu lassen (Alt-S oder Menü: Erweiterungen (Tools) -> “Autoauswahl Stern” – “Auto-select Star”); dazu wäre eine aktuelle Dunkelbild-Bibliothek sinnvoll.
In der Statusleiste unten links werden nun zwei Zahlen angezeigt: m=… und SNR=…..(magnitude und Signal Noise Ratio — Aber was sagen diese Zahlen ???????) –
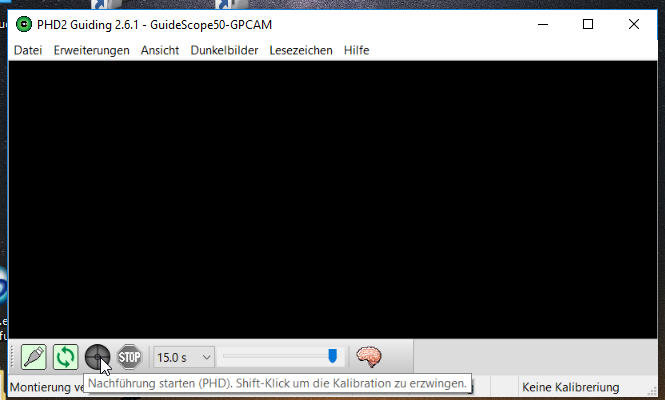
Danach kann man jetzt auf das Symbol “Guiding” klicken (rechts vom Symbol “Looping”).
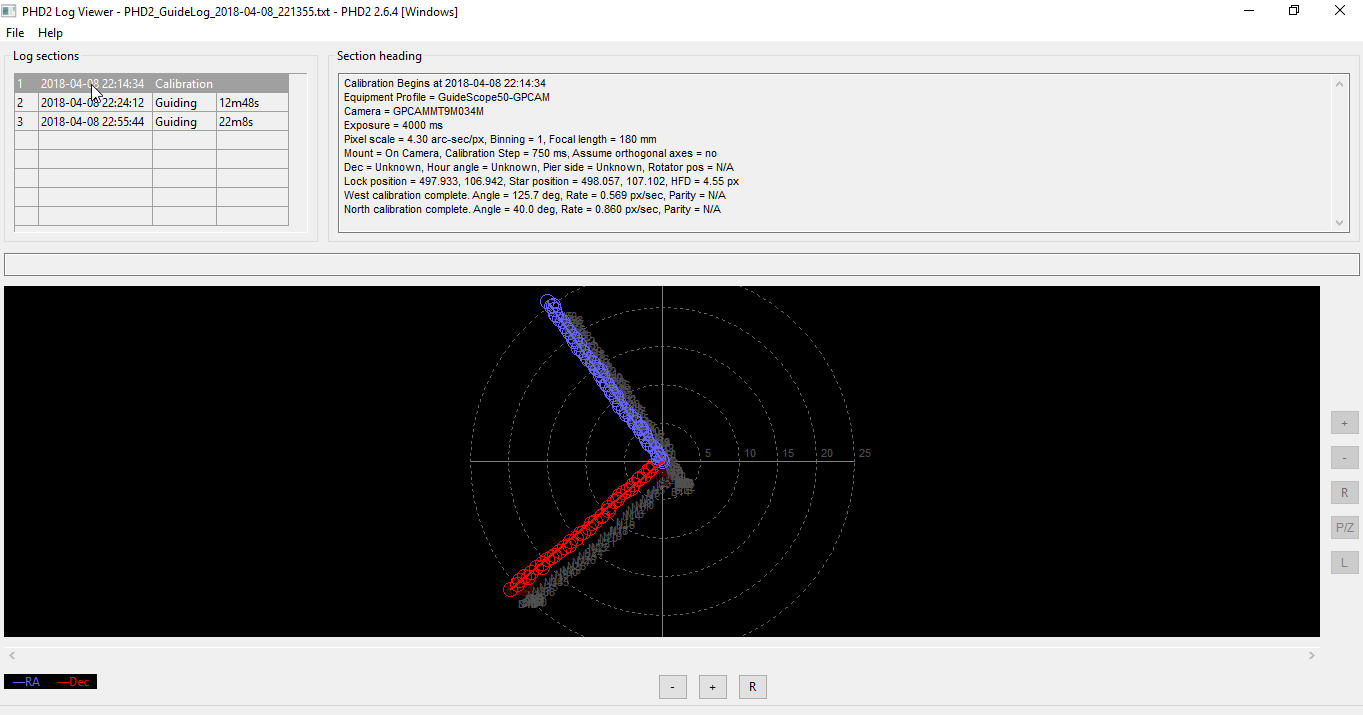
Da tut sich erst einmal garnichts. Ich dachte schon, alles Mist und den Versuch abbrechen. Aber: Wenn man auf Guiding klickt, startet eben nicht das Guiding, sondern die Calibration. Es startet also die sog. Kalibrierung, was man unten links in der Statuszeile sehen kann, wo die Kalibrierungsschritte angezeigt werden…
6. PHD Calibration
Also wenn man jetzt auf das Symbol “Guiding” (in der unteren Leiste das dritte von links) klickt, beginnt also zunächst eine sog. Calibration.
In der Statusleiste unten links werden die Kalibrierungsschritte angezeigt.
Warum Kalibrierung?
PHD2 benötigt die Kalibrierung für zwei Dinge:
messen wieviel ein Guiding-Impuls die Montierung bewegt (Bogensekunden bzw. Pixel)
messen des Drehwinkels der Guiding-Kamera in Bezug auf die Montierungsachsen
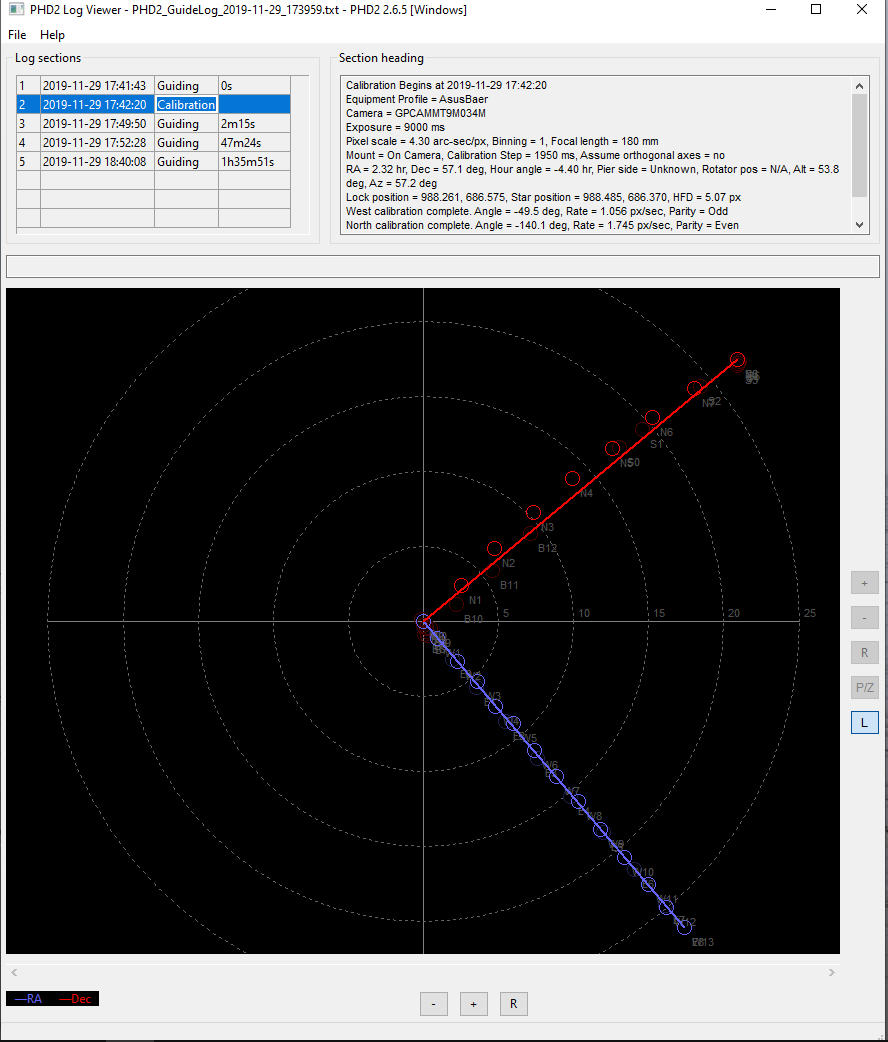
Ablauf der Kalibrierung
Zur Calibration werden Guiding-Impulse in alle vier Richtungen (West, Ost, Süd, Nord) geschickt und dann gemessen, wieviele Pixel bewegt wurden; wobei nur die West- und Nord-Bewegungen tatsächlich für die Kalibrierungs-Rechnung herangezogen werden – Ost und Süd dient nur zum Zurückfahren.
Calibration: Einstellung der Guiding Steps – Nachführungsschritte
Bei der Kalibrierung möchte PHD2 den Leitstern schrittweise um 25 Pixel in jeder Richtung bewegen…
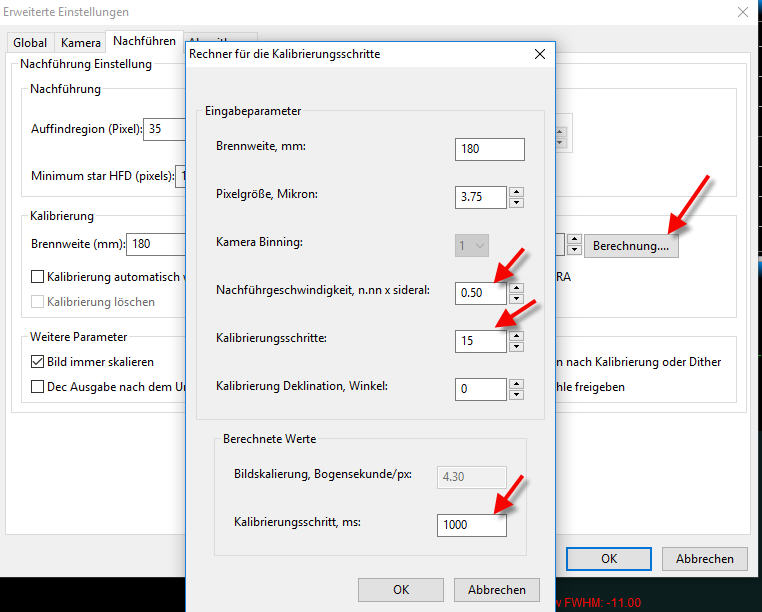
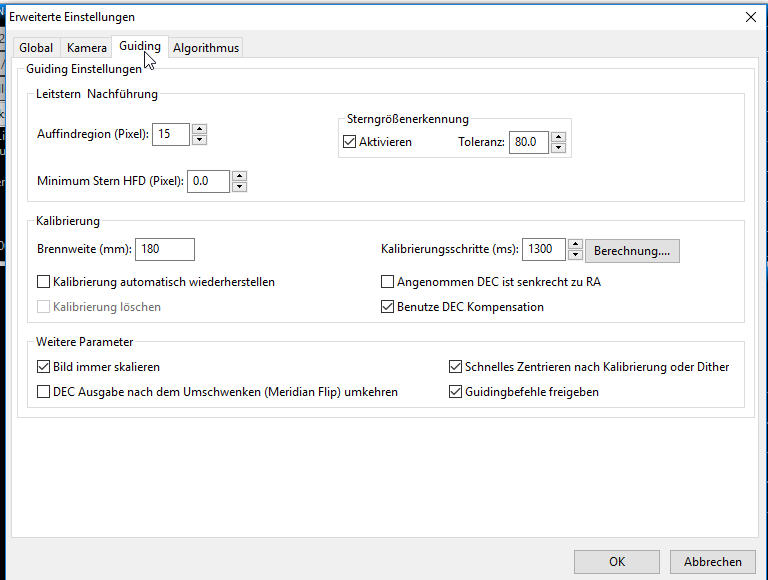
Evtl. hat man zu wenig Guiding-Steps; dann sollte unter Settings im Tab “Guiding” die Guiding-Steps (ms) verändert werden am besten mit Hilfe der Schaltfläche “Calculate…”
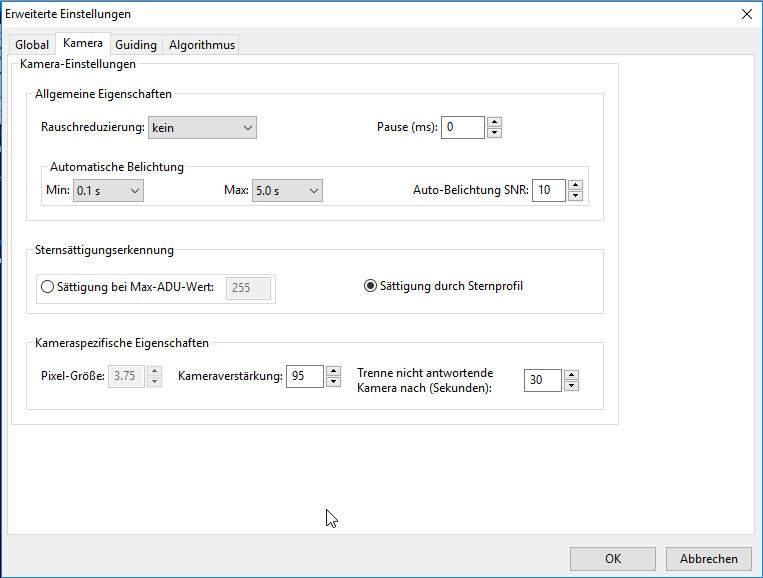
Bevor man die Guiding-Steps selber einstellt, sollte man Brennweite und Pixel-Größe der Guiding-Kamera korrekt eingegeben haben:
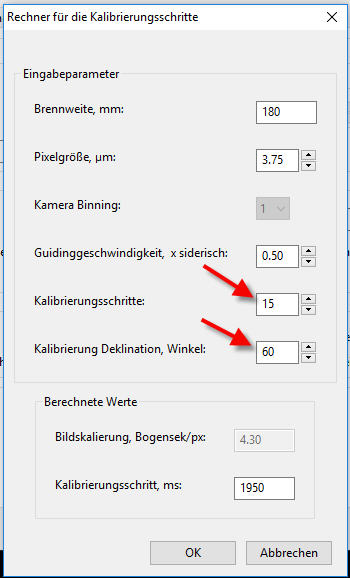
Die zeitliche Länge (Dauer) eines Kalibrierungsschritts (in Millisekunden) kann man selbst per Hand eingeben. Wenn die Kalibrierung zu lange dauert, kann man die Dauer eines Impulses erhöhen, damit die angestrebten 25 Pixel mit weniger Schritten erreicht werden. Hilfreich ist dabei aber die Schaltfläche “Berechnung…” (hinter Erweiterte Einstellungen -> Nachführen -> Kalibrierungsschritte).
Es wird empfohlen, die Nachführgeschwindigkeit auf 0,5 einzustellen.
Für die Anzahl der Kalibrierungsschritte wird so etwa 12 empfohlen. Man muss die Kalbrierung dann mal beobachten, ob die Anzahl der Kalibrierungsschritte mit der Dauer in Millisekunden passt, um eine Bewegung von 25 Pixel zu erreichen…
Calibration: Fertig
Nach erfolgreicher Kalibrierung springt in der Statuszeile unten rechts der Text “No cal” um in “Cal” und das eigentliche Guiding beginnt…
7. PHD Guiding und Optimierung des Guiding
Nachdem die Kalibrierung erfolgreich durchgeführt wurde geht das PHD in den Status “Guiding” (Nachführen) über. In der Statusleiste unten links erscheint dann der Text “Guiding”…
Das Guiding kann durch diverse Einstellungen beeinflusst werden (s.u.). Beispielsweise will man ja nicht dem Seeing hinterherlaufen; also muss dass Guiding die kleinen schnellen Schwankungen der Luftunruhe ignorieren (siehe Minimum Movement und Guiding Assistant).
Die Qualität des Autoguiding kann man gut im Informationsfenster “Verlauf der Nachführung” (History Graph) s.u. Menü -> Ansicht (View) -> Anzeige Graph (Display Graph) verfolgen.
Falls die Qualität des Autoguiding verbesserungswürdig erscheint, kann man mit diversen Einstellungen (“Settings”) versuchen Einfluss zu nehmen.
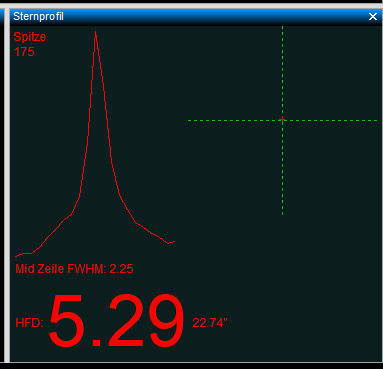
Hilfreich kan auch das “Stern-Profil” sein unter: Menü -> Ansicht -> Sternprofil
Im Sternprofil wird das Helligkeitsprofil des ausgewählten Leitsterns angezeigt.
Wenn die Spitze oben in der Mitte nicht spitz, sondern flach ist, wäre der Leitstern zu hell “gesättigt” bzw. “ausgebrannt”.
Die Zahl, die ganz groß angezeigt wird ist der HFD Half Flux Diameter; also der innere Sterndurchmesser, dessen Kreisscheibe 50% des Lichts enthält. Der HFD-Wert ist besser als der früher übliche FWHM-Wert, da er auch bei nicht gut fokussierten Sternen, einen klar definierten Wert liefert. Der HFD-Wert wird extra groß angezeigt, weil man ihn zum Fokussieren des Leitrohres gut aus der Ferne sehen kann (HFD = Min!).
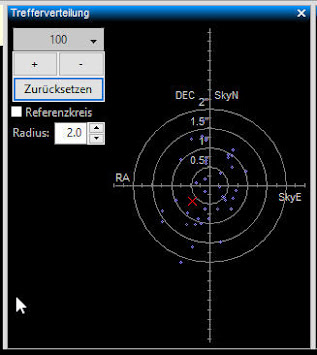
Ebenfalls hilfreich bei ber Beurteilung der Qualität des Auto Guidings kann die sog. “Trefferverteilung” sein:
Welche Fenster aufmachen? Im Menüpunkt “View” können verschiedene Informationsfenster aktiviert werden, z.B.
History
Target
Guide Stats
u.a.
Fenster: History Graph
Einstellungen rechts oben:
Maßstab der x-Achse: x 200
Maßstab der y-Achse: +/- 4″ oder auch 8″
Settings: Arc Seconds (nicht Pixel)
Correction: anhaken (das genau will man ja)
Trend: nicht immer sinnvoll
Unterhalb des Graphen können folgende wichtige Einstellungen vorgenommen werden:
RA aggression: 30
Dec aggression: 30
RA Hysteresis: 15
Dec Hysteresis: N/A
RA MinMo: 0,30 (mit dem Guiding Assistant)
Dec MinMo: 0,30 (mit dem Guiding Assistant)
Scope Max RA=2000, Dec=2000
Dec = Auto/North/South/Off
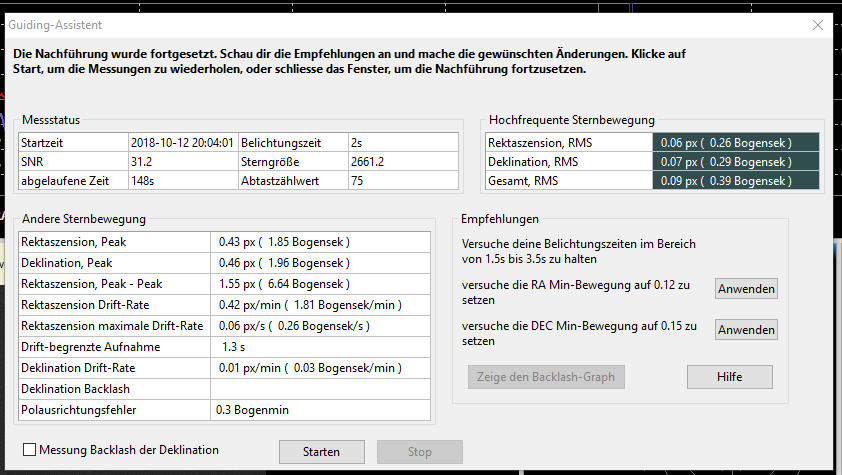
Guiding Assistant – Nachführassistent
Es wird empfohlen, den sog. Guiding Assistant zu verwenden. Dieser kann aufgerufen werden, nachdem das Polar Alignment vorgenommen wurde, die Verbindungen zu den Geräten hergestellt sind, die Guiding-Kamera eingestellt und ein Guiding-Stern ausgewählt wurde und die Kalibrierung erfolgt ist: d.h. das Guiding ist gerade gestartet. Dann kann man den Guiding Assistant aufrufen (Menü -> Tools -> Nachführassistent), der das Guiding dann erst einmal unterbricht und seine Messungen vornimmt.
Es wird empfohlen, den Guiding-Assistenten so 2-3 Minuten laufen zu lassen; für genauere Messungen sollte man mindestens eine Worm-Periode der Montierung nehmen (HEQ5 Pro: 638,25 Sekunden).
Da die Guiding-Nacht meist etwas hektisch wird, ist es sinnvoll, sich die Feinheiten des erfolgten Guidings in aller Ruhe im nachhinein im sog. Logfile-Viewer anzuschauen und zu analysieren.
Der Ort der Log-Files wird bestimmt durch: Advanced Settings (Brain Symbol) -> Global -> Log File Location
Nachführung mit dem Skywatcher Star Adventurer Mini “SAM”
Reise-Nachführungen (Star Tracker)
Für die Nachführung habe ich mir im Mai 2018 einen Star Adventurer Mini bei Teleskop-Service (EUR 205,00) angeschafft, um auch bei weiten Flugreisen (Südafrika, Namibia) eine mobile Nachführungsmöglichkeit für meine Astro-Aufnahmen mit dem Fotoapparat (Sony NEX-5R) bzw. meiner neu erstanderen DSLR Canon EOS 600D zu haben. Später kam ja noch die ZWO ASI294MC Pro hinzu, die ich in 2012 auch so in Namibia einsetzen möchte.
Ich hatte am 24.7.2017 schon die Skywatcher Star Adventurer Wedge gekauft (EUR 71,00 bei Astro-Shop), auf die ich damals meinen vorhandenen NanoTracker installiert habe.
Nun (7.5.2018) habe ich mich entschlossen, keine solche Kompromisse mehr zu machen und auch eine Star Adventurer Mini (“SAM”) Nachführ-Einheit zu kaufen (EUR 205,00 bei Teleskop Express) – Damit ist die Polausrichtung einfacher, da ein beleuchtetes Polfernrohr dabei ist; ausserdem kann wohl mein QHY PoleMaster auf dem Star Adventurer installiert werden und auch das Polar Alignment mit SharpCap Pro ist mögliech.
Skywatcher Star Adventurer Mini (neu, klein und leichter: 0,65 kg, Periodic Error 50″)
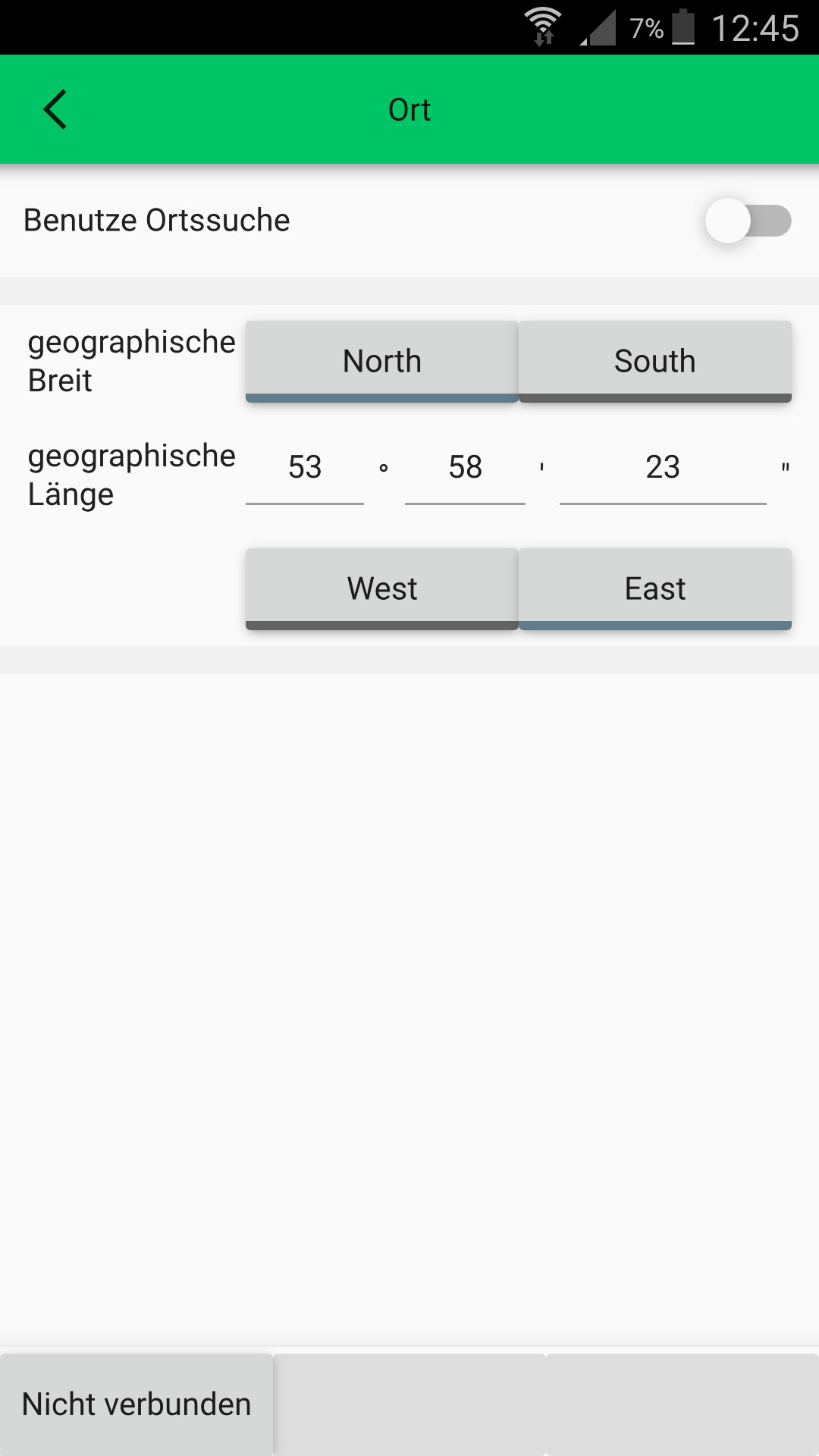
Leider verfügt die Star Adventurer Mini “SAM” nur über einen An-/Aus-Scalter; alle Einstellungen müssen über WiFi und eine App gemacht werden. Ein riesiges Problem dabei ist: wie kann ich feststellen, ob die Nachführung läuft oder nicht? Wie kann ich von Nordhalbkugel auf Südhalbkugel umstellen?
Das Riesenproblem bei mir ist, dass meine (in 2022 neu installierte) SA Console Android APP einen Fehler bei der Einstellung der geografischen Koordinaten des Beobachtungsorts hat: Die geografische Breite kann nicht eingestellt werden:
Abbildung 2: Fehlerhafte SA Console -> Einstellungen -> Ort (Google Drive: Sky-Adventurer-Mini 01.jpg)
Fehlerumgehung (Workaround): Es gibt mittlerwele eine SA Console für Windows auf der Website von Skywatcher, die diesen Fehler nicht hat.
Hoffnung: Nach Update der Firmware des Motors der SAM ist Motor-Firmware und die Android App beide auf dem neuesten Stand und vielleicht geht es dann. Aber wie macht man sicher einen Update der Firmware???
Firmware Update
Go to www.skywatcher.com
Download the “Motor Controller Firmware Loader” V1.63 or higher from the Downloads page.
You will need this program to load your firmware updates
Zubehör: Wedge
Als erstes (24.7.2017) habe ich mir die Wedge gekauft (siehe Bild oben), denn damit kann man Azimuth und Polhöhe fein verstellen, wie man es von den “großen” Montierungen her kennt. Vorher hatte ich dafür Kugelköpfe und Neiger im Einsatz.
Die Wedge verwende ich jetzt (April 2022) auch für meine Goto-Reisemontierung Skywatcher AZ-GTi.
Zubehör: Deklinationseinheit
Um komplett zu sein. habe ich mir später auch noch die sog. “Deklinationseinheit” gekauft. Damit kann man die Deklination fein verstellen. Ausserdem hat es eine Gegengewichtsstange mit Gegengewicht. Interessant für bestimmte Anwendungen ist auch die Tatsache, dass die Befestigung der Kamera o.ä. mit einer Fotoschraube um 90 Grad geneigt ist (sog. L Bracket).
Abbildung 3: Deklinationseinheit des Star Adventurer (Google Drive: 20200626_SAM_Deklinationseinheit.jpg)
Stromversorgung
Den elektrischen Strom bekommt der Star Adventurer Mini “SAM” entweder über zwei AA-Batterien oder über einen Micro-USB-Anschluss (der sonst keine weitere Funktion hat).
Anschalten und Ausschalten
Das An- und Ausschalten ist die einzige Bedienung, die per Hand vorgenommen werden kann. Alles andere erfolgt ausschliesslich über WiFi mit der App “SAM Console”.
Das Anschalten aktiviert das WiFi; Frage: wird auch die motorische Nachführung damit gestartet???
Zum Anschalten drückt man den größeren Knopf einige Sekunden, bis die LEDs aufleuchten.
Zum Ausschalten drückt man den größeren Knopf einige Sekunden, bis die LEDs ausgehen.
Besonderheiten
Die Bedienung erfolgt ausschließlich über eine per WiFi verbundene App (iOS und Android) namens “SAM Console“.
Neuerdings heisst die App “SA Console”.
Zum Starten der nachführung gehe ich in der App auf “Astrofotografie” und dann auf “Start”. Mit dem Ohr ganz dicht am SAM kann ich hören, das da ein Motor läuft.
Die Umschaltung von Nord- auf Süd-Betrieb scheint über die geografische Breite des eingestellten beobachtungsorts zu funktionieren…
Polar Alignment: Einnorden – Einsüden
Voraussetzung für eine gute Nachführung durch den Star Advanturer Mini ist natürlich eine ordentliche Ausrichtung auf den Himmelpol. Zum Polar Alignement kann man verschiedene Methoden verwenden:
Zum Einnorden (Polar Alignment) kann man das Polfernrohr benutzen, das ist im Süden allerdings problematisch, weil Sigma Octantis nicht so leicht zu finden ist.
Das Polfernrohr wird von hinten in den SAM gesteckt. Dazu muss hinten der “Curled Tripoid Connector” abgeschraubt werden. Vorne schaut das Polfernrohr dann etwas aus dem “Dovetail Saddle” heraus und man kann die Polfernrohr-Beleuchtung aufstecken.
Allerdings kann man dann den “Ball Head Adapter” nicht mehr zusammen mit dem Polfernrohr benutzen. D.h. erst mit Polfernrohr ausrichten, dann Polfernrohr abbauen und “Dovetail Saddle” mit Kamera aufbauen: Das kann die vorgenommene Polausrichtung zerstören; ausserdem möchte man seine Geräte nicht “im Felde” umbauen.
Ausweg: Nicht den “Ball Head Adapter” verwenden, denn der blockiert die Sicht für das Polfernrohr, sondern eine Vixen-Schiene mit Aussparung (Langloch) in der Mitte benutzen. Dann blickt das Polfernroht durch die Aussparung in der Schiene – allerdings passt dann nicht mehr die Polfernrohr-Beleuchtung drauf.
Abbildung 4: Star Adventurer Mini “SAM” mit Polfernrohr (Google Drive: DK_20180512_2529.jpg)
SkyWatcher Polfernrohr an Star Adventurer Mini (SAM)
Polar Alignment mit SharpCap
Mit SharpCap Pro kann man ein sehr gutes Polar Alignment machen. ShapCap macht dabei ein vollautomatsiches Plate Solving und benutzt das vorhandene Guiding-Equipment.
Die bekannte Faustformel ist: Max. Belichtung in Sekunden = 500 dividiert durch Brennweite in Millimetern
Nachführung mit Getriebspiel und Periodic Error
Das Getriebespiel (Backlash) kann man vermeiden, wenn man den SAM fünf Minuten vor eine Aufnahme “vorlaufen” lässt. Dann sollte der Backlash “vorbei” sein.
Was dann bleibt, ist der Schneckenfehler (Periodic Error).
Der Periodic Error (PE) könnte mit PEMPRO V2.8 gemessen werden.
Bei einer Brennweite von 135mm ergibt das eine Pixel Scale von 6,56 arcsec / Pixel (Formel)
Bei einem PE von angenommen 100 arcsec wären das 100 arcsec / 28,7 Minuten = 3,5 arcsec / Minute
Man könnte also im Schnitt 2 Minuten belichten ohne dass der PE sichtbar würde
Gestiegene Anforderungen an die Genauigkeit bei der Nachführung
Bisher hatte ich mit meiner Sony NEX-5R maximal 30 Sekunden belichtet und dabei Objektive von 16mm (Zenitar – z.B. Perseiden), 24mm (Vivitar – z.B. Nordlicht) und 50mm (Olympus – z.B. Magellansche Wolke) benutzt. Da war die Nachführgenauigkeit des NanoTracker überhaupt kein Problem.
Aber die Anforderungen an die Genauigkeit sind bei mir durch zwei Entwicklungen gestiegen:
Ich habe ein Objektiv mit wesentlich längerer Brennweite bekommen: Takumar 135mm f/3.5 (neu: Olympus E.Zuiko 135mm f/3.5).
Ich habe auch herausgefunden, wie ich mit meiner Sony NEX-5R länger als 30sec belichten kann. 30sec maximal macht die Sony per Programm mit Smart Remote, Langzeitbelichtung geht dann mit Bulb und einemInfrarot-Fernauslöser
Wie genau ist meine Nachführung?
Für eine sehr genaue Pol-Ausrichtung sorge ich mit meinem QHY PoleMaster. Dann sollten weitere Fehler auf den NanoTracker selbst und da im Wesentlichen auf den PE (Periodic Error) oder auch Schneckenfehler zurückzuführen sein. Aber wie kann ich ganz einfach mal die Genauigkeit der Nachführung (quasi end-to-end) messen?
Meine ganz simple Idee ist, einfach eine Serie von Aufnahmen von ein und demselben Objekt mit eingeschalteter Nachführung zu machen (z.B. 15 sec Belichtung, 15 sec Pause und das 30 Minuten lang – weil die Scheckenperiode 28,72 Minuten sein soll). Diese Aufnahmeserie könnte ich z.B. Plate Solven und die Ergebnisse dann in Excel darstellen….
I used my Atlas EQ-G with the Orion 102ED f/7 scope this weekend to shoot my first set of astro pictures (will post some results here at a later time). However, since I don’t have an Auto-guider setup and I heard a lot of good things about the Atlas I figured I’ll see how long the mount can track accurately and was a little surprised to only get relatively short exposures. At 60s I had to throw out almost half of the exposures due to some star trailing (in RA direction), 30s exposures consistently looked good, except for a few. I also took some 120s exposures and also had to throw out at least half. Not quite what I had in mind. Did I expect too much here?
Anyhow, I drift aligned the mount to the best of my abilities actually using the DSLR since I also don’t have a cross hair eye piece, yet. I used the technique where you expose for 5s to mark the star and then move the mount forward in RA for about 60s at twice the siderial rate and then essentially stop the tracking for another 60 seconds, all while the shutter is open. The result is a V shaped line in the image if there is any misalignment. Worked like a charm and I might actually perform the alignment this way in the future instead of using the eye piece. I adjusted the mount as needed and got no more drift in the image for up to 3 minutes.
So, to make a long story short, the only reason for the star trails that I can think of now is RA tracking errors in the mount. I’d like to actually “see” the periodic error, etc. somehow in an image but can’t quite figure out how I would go about doing that. Do you guys have any suggestions?
Thx in advance,
/ThJ
Posted 16 March 2009 – 11:14 AM
The short answer: Take a series of short exposure images (may need a brightish star) that totals longer than the period of the worm (typ 10min).
Use a stacking program that measures and records (to a file) the x,y coordinates of the star (the program should find the star’s centroid). AIP4WIN does this.
Import the recorded coordinates into Excel (or another spreadsheet program) and plot the x and y values vs exposure number. The PE will easily be seen in the plot.
Some calculation using the scopes focal length and the pixel sizes will give you PE in Arcsec.
If you align the camera so that RA is along the pixel rows (x-coordinate) then there should be no movement in the y direction if your polar alignment is perfect. Any change in the y is polar misalignment.
I have a spreedsheet at home from my Super Polaris mount. Let me know if you need more help on this part.
Wenn man mit der “normalen” Nachführung seiner Montierung nicht mehr ausreicht, benötigt man ein sog. “Autoguiding”.
Sehr beliebt ist die Autoguiding-Löung mit der Software PHD2 Guiding auf einem Notebook-Computer.
Lacerta M-GEN dagegen ist eine sog. “Stand-Alone Lösung” für Autoguiding; d.h. sie funktioniert ohne einen Notebook-Computer. Dadurch wird die Komplexität im Felde reduziert.
Nachteile von M-GEN:
Sehr teuer (ca. EUR 650,–)
Zusätzliche Stromversorgung für das Gerät
MGEN Daten
Generell
Aktuelle Version: V2.40 — Neu: Einnorden nach Scheiner
Strom 12V 120 mA
Kamera
Sony CCD Chip ICX279AL-E, 752×582 Pixel, 3,6×2,7 mm. Pixelgröße 4,7μ
Den elektrischen Strom bekommt der NanoTracker über ein separates Kästchen mit 3 AA-Akkus.
Das finde ich sehr praktisch von der Handhabung und ausserdem vermindert das die Traglast auf dem Stativ.
Maximale Belichtungszeit ohne Nachführung
xxxx
Nachführung mit Getriebspiel und Periodic Error
Das Getriebespiel (Backlash) kann man vermeiden, wenn man den NanoTracker fünf Minuten vor eine Aufnahme “vorlaufen” lässt. Dann sollte der Backlash “vorbei” sein.
Was dann bleibt, ist der Schneckenfehler (Periodic Error).
Der Periodic Error (PE) könnte mit PEMPRO V2.8 gemessen werden.
Bei einer Brennweite von 135mm ergibt das eine Pixel Scale von 6,56 arcsec / Pixel (Formel)
Bei einem PE von angenommen 100 arcsec wären das 100 arcsec / 28,7 Minuten = 3,5 arcsec / Minute
Man könnte also im Schnitt 2 Minuten belichten ohne dass der PE sichtbar würde
Gestiegene Anforderungen an die Genauigkeit bei der Nachführung
Bisher hatte ich mit meiner Sony NEX-5R maximal 30 Sekunden belichtet und dabei Objektive von 16mm (Zenitar – z.B. Perseiden), 24mm (Vivitar – z.B. Nordlicht) und 50mm (Olympus – z.B. Magellansche Wolke) benutzt. Da war die Nachführgenauigkeit des NanoTracker überhaupt kein Problem.
Aber die Anforderungen an die Genauigkeit sind bei mir durch zwei Entwicklungen gestiegen:
Ich habe ein Objektiv mit wesentlich längerer Brennweite bekommen: Takumar 135mm f/3.5 (neu: Olympus E.Zuiko 135mm f/3.5).
Ich habe auch herausgefunden, wie ich mit meiner Sony NEX-5R länger als 30sec belichten kann. 30sec maximal macht die Sony per Programm mit Smart Remote, Langzeitbelichtung geht dann mit Bulb und einemInfrarot-Fernauslöser
Wie genau ist meine Nachführung?
Für eine sehr geneue Pol-Ausrichtung sorge ich mit meinem QHY PoleMaster. Dann sollten weitere Fehler auf den NanoTracker selbst und da im Wesentlichen auf den PE (Periodic Error) oder auch Schneckenfehler zurückzuführen sein. Aber wie kann ich ganz einfach mal die Genauigkeit der Nachführung (quasi end-to-end) messen?
Meine ganz simple Idee ist, einfach eine Serie von Aufnahmen von ein und demselben Objekt mit eingeschalteter Nachführung zu machen (z.B. 15 sec Belichtung, 15 sec Pause und das 30 Minuten lang – weil die Scheckenperiode 28,72 Minuten sein soll). Diese Aufnahmeserie könnte ich z.B. Plate Solven und die Ergebnisse dann in Excel darstellen….
I used my Atlas EQ-G with the Orion 102ED f/7 scope this weekend to shoot my first set of astro pictures (will post some results here at a later time). However, since I don’t have an Auto-guider setup and I heard a lot of good things about the Atlas I figured I’ll see how long the mount can track accurately and was a little surprised to only get relatively short exposures. At 60s I had to throw out almost half of the exposures due to some star trailing (in RA direction), 30s exposures consistently looked good, except for a few. I also took some 120s exposures and also had to throw out at least half. Not quite what I had in mind. Did I expect too much here?
Anyhow, I drift aligned the mount to the best of my abilities actually using the DSLR since I also don’t have a cross hair eye piece, yet. I used the technique where you expose for 5s to mark the star and then move the mount forward in RA for about 60s at twice the siderial rate and then essentially stop the tracking for another 60 seconds, all while the shutter is open. The result is a V shaped line in the image if there is any misalignment. Worked like a charm and I might actually perform the alignment this way in the future instead of using the eye piece. I adjusted the mount as needed and got no more drift in the image for up to 3 minutes.
So, to make a long story short, the only reason for the star trails that I can think of now is RA tracking errors in the mount. I’d like to actually “see” the periodic error, etc. somehow in an image but can’t quite figure out how I would go about doing that. Do you guys have any suggestions?
Thx in advance,
/ThJ
Posted 16 March 2009 – 11:14 AM
The short answer: Take a series of short exposure images (may need a brightish star) that totals longer than the period of the worm (typ 10min).
Use a stacking program that measures and records (to a file) the x,y coordinates of the star (the program should find the star’s centroid). AIP4WIN does this.
Import the recorded coordinates into Excel (or another spreadsheet program) and plot the x and y values vs exposure number. The PE will easily be seen in the plot.
Some calculation using the scopes focal length and the pixel sizes will give you PE in Arcsec.
If you align the camera so that RA is along the pixel rows (x-coordinate) then there should be no movement in the y direction if your polar alignment is perfect. Any change in the y is polar misalignment.
I have a spreedsheet at home from my Super Polaris mount. Let me know if you need more help on this part.
Wofür brauche ich eine Nachführung und wie genau muss die sein?
Bei der Astrofotografie wird man die Einzelfotos (siehe Stacking) meistens länger belichten wollen z.B. 30 Sekunden oder 5 Minuten (oder…) – dabei werden Sterne nicht mehr punktförmig, sondern werden kleine Striche, was man meistens nicht so will. Diese scheinbare Bewegung der Sterne am Himmel ist ein Spiegelbild der Erdrotation. Am Himmelsäquator bewegen sich die Sterne in 4 Minuten um 1 Grad; in höheren Deklinationen muss man mit dem Cosinus der Deklination multiplizieren z.B. bei 60 Grad Deklination ist es in 4 Minuten nur ein halbes Grad.
Abbildung 1: Konzentrische Strichspuren am Himmelspol (pCloud: DK_20150604_05307-05396_StarStaX_gap_filling_beschriftet.jpg)
StarTrails Hamburg-Eimsbüttel
Diese scheinbare Bewegung der Sterne am Himmel will man während der Aufnahme durch eine entgegengesetzte Bewegung kompensieren; das nennt man Nachführen – Nachführung – engl. Tracking.
Im Zusammenhang mit dem “Tracking” steht das “Pointing“. Pointing bedeutet das Richten des Teleskops auf eine bestimmtes Objekt am Himmel, was man auch gerne “Suchen” oder “Goto” oder “Slew to target” nennt. Die Genauigkeit von Pointing wird durch die mittlere Abweichung zwischen Soll-Position und Ist-Postion gemessen, wobei die “mittlere” Abweichung gerne als “RMS” = Root Mean Square (Wurzel aus dem Mittelwert der Abweichungsquadrate) angegeben wird. Im Amateurbereich ist eine RMS von 30″ sehr gut.
Nachführung (Tracking) benötigt man aber nicht nur, um bei Einzelaufnahmen punktförmige Sterne zu erhalten, sondern auch, wenn man eine längere Serie von Einzelaufnahmen per Software automatisch ausführen möchte z.B. 30 Einzelaufnahmen von je 5 Minuten, was insgesamt 150 Minuten dauern würde. In einer solchen Zeit würde das Objekt ohne Nachführung ganz aus dem Gesichtsfeld laufen.
Achtung: Der oft verwendete Begriff “Guiding” bedeutet ein optimiertes/korrigiertes Tracking. Es gibt also “unguided tracking” und “guided tracking”. Über das “guided tracking” schreibe ich im Artikel “Autoguiding“.
Das Tracking einer motorischen Nachführung kann durch ein sog. Auto-Guiding verbessert werden. Dabei wird das “blinde” Tracking der Montierung (ein Motor dreht in 24 Stunden um 360°) ergänzt durch eine tatsächliche Beobachtung eines Leitsterns in einem “Guiding-Fernrohr”. Aus dort sichtbar werdenden Abweichungen kann eine Software (z.B. PHD2 Guiding) Korrekturbefehle für die Computersteuerung des Teleskops ableiten. Dabei müssen Korrekturen sowohl in der Rektaszension als auch in der Deklination möglich gemacht werden; d.h. es sind computergesteuerte motorische Bewegungen in zwei Achsen erforderlich.
Voraussetzung: Polar Alignment
Um eine genaue Nachführung mit einer äquatorialen Montierung zu erreichen ist absolute Grundvoraussetzung eine sehr gute Einnordung (Polar Alignment). Das gilt besonders dann, wenn man Brennweiten von mehr als 50mm und Belichtungszeiten von mehr als 30 Sekunden plant.
Lösungen zur Nachführung (Normalfall)
Um die Nachführung nicht per Hand machen zu müssen, gibt es elektrisch betriebene Einrichtungen wo die Montierung mit Servomotoren (oder Schrittmotoren) die erforderliche Nachführ-Bewegung (das Tracking) automatisiert erledigt.
Wenn man die Sub-Exposures länger belichten will (z.B. 5 Minuten oder noch länger – welchen Sinn machen längere Belichtungszeiten?), kann das Tracking der üblichen Montierungen doch zu ungenau werden und man muss sich fragen, wie man eine genauere Nachführung erzielen kann. Zwei Wege wären dann zu überlegen:
Sonderlösungen zum Nachführen bei bewegten Objekten
Wenn man nicht auf die Sterne, sondern auf ein (relativ zu den Sternen) bewegtes Objekt nachführen will, muss man diese Bewegung zusätzlich berücksichtigen.
Typischerweise werden verschiedene Tracking Rates von den gängigen Systemen (z.B. Skywatcher SynScan) angeboten:
Siderial Tracking
Lunar Tracking
Solar Tracking
Aber wenn das nicht ausreicht, muss man die genaue Bewegung des Beobachtungsobjekts (z.B. Komet, Asteroid,…) anhand von Ephemerieden numerisch berücksichtigen:
Dies sind kleinere Geräte/Vorrichtungen, die transportabel sind und so z.B. auf Reisen mitgenommen werden können. Diese Geräte verfügen über eine Drehachse, die parallel zur Rotationsachse der Erde ausgerichtet werden muss (siehe: Einnorden ).
Weitere “kleine” Lösungen zur Nachführung (neueren Datums)
Zeitweise war ich mit der Nachführgenauigkeit meines NanoTrackers unzufrieden und habe mich nach Alternativen umgeschaut:
Tabelle 1: Startracker im Vergleich
Vixen Polarie
Star Adventurer Mini
Star Adventurer
Preis
375,–
239,–
280,–
Gewicht
740g
650g
1200g
Stromversorgung
2 x AA
Mini-USB
2 x AA
Micro-USB
4 x AA
USB
Traglast
2 kg
3 kg
5 kg
Polsucher
nein
ja
ja
WLAN
nein
ja
nein
Shutter Control
nein
ja
nein
ST-4 zum AutoGuiding
nein
nein
ja
Zubehör
kaum
reichhaltig
reichhaltig
Große Lösungen zur Nachführung (Tracking)
Montierungen mit einer computergesteuerten motorischen Nachführfunktion (Tracking).
Azimutale Montierungen (Nachführung in zwei Achsen)
Parallaktische Montierungen (Nachführung in einer Achse)
Bei einer azimutalen Montierung (gerne AltAz genannt) sind die Drehachsen eben nur Höhenwinkel und horizontale Himmelsrichtung. Da die Himmelsobjekte aber schräg dazu laufen (ausser an den Polen) entsteht bei so einer Nachführung eine Treppenlinie und eine sog. Bildfeldrotation. Man muss sich überlegen, ob das für eine geplante Aufnahme hinnehmbar ist oder nicht.
Bei der parallaktischen Montierung muss die Drehachse (Stundenachse) parallel zur Rotationsachse der Erde ausgerichtet werden (siehe: Einnorden ).
Wie genau eine Nachführung sein muss (in Bogensekunden), damit die Sterne noch Punktförmig abgebildet werde, hängt von dem Abbildungsmaßstab der Optik bezogen auf die Pixelgröße des Sensors ab.
Die scheinbare Bewegung der Sterne am Himmel durch die Erdrotation beträgt: 360° = 360 * 60 * 60 arcsec = 1296000 arcsec in 24 Stunden (24*60*60 = 86400 Sekunden) am Himmelsäquator (δ=0).
Zum Thema “Auflösungsvermögen” habe ich einen gesonderten Artikel geschrieben.
Die Formel für das Auflösungsvermögen (wegen Beugungsscheibchen) lautet:
Auflösung in arcsec = 138 / Objektivöffnung in mm
(wobei 138 = lambda * 206,265, mit lambda = 670 nm)
Um eine genaue Einstellung einer äquatorialen Montierung zu erreichen ist das sog. Alignment (auch Stellar Alignment oder Goto-Alignment), also die Ausrichtung an Referenzsternen erforderlich. Erst dann ist die volle Funktionalität einer Montierung gegeben; d.h. Nachführung, Goto-Funktion etc.
Genauer gesagt muss so eine Ausrichtung nicht notwendig an “Referenzsternen” erfolgen, es reicht wenn man die Ausrichtung auf “Referenzpositionen” vornimmt. Eine solche “Referenzpositionen” erhält man beispielsweise durch Plate Solving.
Oversampling / Undersampling
Man stellt sich vor, dass das Pixel-Raster des Sensors das Bild der Optik “abtastet” (Abtasten = Sampling). Wir haben also eine analog-digital-Wandlung.
Oversampling hat man, wenn der Pixel-Scale feiner ist als die Auflösung. Jedes Pixel bekommt weniger Licht (Photonen) als eigentlich möglich. Das ist meistens nicht so gut.
Undersampling hat man, wenn der Pixel-Scale gröber ist als die Auflösung. Man “verschenkt” also eine eigentlich mögliche höhere Auflösung, was bei größeren Sternfeldern durchaus gewollt sein kann
Das Auflösungsvermögen war 2,73 arcsec, was bei einer Brennweite von 180 mm ein Beugungsscheibchen vom Radius 2,42 µm ergibt
Die Pixelgröße der GPCAM beträgt 3,75 µm
Wir haben hier also ein leichtes Undersampling
Die Auflösung ist 138 / 80 = 1,73 arcsec, das entspricht bei einer Brennweite von 600 mm einem Radius des Beugungsscheibchens von 5,03 µm
Die Pixelgröße der Canon ist 4,3 µm
Wir haben hier also ein leichtes Oversampling
Die Auflösung ist 138 / 80 = 1,73 arcsec, das entspricht bei einer Brennweite von 600 mm einem Radius des Beugungsscheibchens von 5,03 µm
Die Pixelgröße der ASI294MC Pro ist 4,6 µm
Wir haben hier also ein leichtes Oversampling
Die 500er-Regel (300er-Regel)
Ab welcher Belichtungszeit eine Nachführung erforderlich ist, hängt von der verwendeten Optik – im Wesentlichen von der Brennweite – ab.
Faustregel: 500 dividiert durch die Brennweite in Millimetern ergibt die maximale Belichtungszeit in Sekunden bei der noch keine Nachführung nötig ist
Wobei: Effektive Brennweite = Wahre Brennweite * Crop-Faktor (der Crop-Faktor soll hier verkehrt sein)
Die Zahl 500 gilt heute als “veraltet”. Man verwendet statt dessen häufig die 300: also 300 / f = Max. Belichtung.
Wir erproben die Genauigkeit der NanoTracker Nachführung mit meiner Kamera Sony NEX-5R und verschiedenen Objektiven.
Für die obige Faustformel haben wir:
Die Sony NEX-5R hat einen APS-C-Sensor (mit einem Crop-Faktor von 1,5)
Das Objektiv Olympus E-Zuiko hat eine Brennweite von 135mm
Die fotografierten Sterne (Cygnus) haben eine Deklination von ca. 42 Grad
Die Faustformel ergibt: 500 / 135 = 3,70 Sekunden maximale Belichtungszeit am Himmelsäquator (Deklination = 0 Grad) und 4,98 Sekunden bei einer Deklination von 42° (cos 42° = 0,7431).
Einzelheiten stehen in meinem separaten Artikel zum NanoTracker.
Beispiel 2: Nachführung mit dem SkyTracker
Wir erproben die Genauigkeit der SkyTracker Nachführung mit meiner Kamera Sony NEX-5R und der Russentonne.
Für die obige Faustformel haben wir:
Die Sony NEX-5R hat einen APS-C-Sensor mit einem Crop-Faktor von 1,5
Die fotografierten Sterne (alpha Geminorum) haben eine Deklination von ca. 32 Grad
Die Faustformel ergibt: 500 / (500 * 1,0) = 1,00 Sekunden maximale Belichtungszeit am Himmelsäquator (Deklination = 0 Grad).
Das fotografiert Objekt war Alpha Geminorum bei einer Deklination von ca. 32 Grad – wobei cos(32°) = 0,8480. Die maximale Belichtungszeit dort wäre nach dieser Faustformel also: 1,00 / 0,8480 = 1,18 Sekunden. Nach der NPF-Regel wären es nur 0,5 Sekunden…
Einzelheiten stehen in meinem separaten Artikel zum SkyTracker.
Meine ursprüngliche Idee war, daraus zusammen mit einer VideoCam einen elektronischen Sucher zu bauen. Das war aber nicht zuende gedacht, da das Gesichtsfeld dann viel zu klein werden würde.
Da das GuideScope50 einen 1,25″ Okulartubus hat, kann ich meine Cam GP-CAM einsetzen und habe eine Brennweite von 180mm. Als elektronischer Sucher ist das nicht sinnvoll, denn das Gesichtsfeld beträgt nur 1,5° x 1,2°.
Damit könnte ich ohne Nachführung Mond und Sonne fotografieren.
Da das GuideScope50 auch ein T2-Gewinde hat, kann ich es mit meinem T2-NEX-Adapter auch wunderschön mit meiner DSLR Sony NEX 5R für fokale Astrofotos verwenden. Das Gesichtsfeld wäre dann 7,5° x 5,0°.
Mein mittelfristiges Ziel ist es ja, Astrofotografie mit meiner DSLR (Canon EOS 600D bzw. Sony NEX 5R) zu betreiben (z.B. mit dem 135mm Foto-Objektiv oder an einem kleinen Refraktor). Dafür brauche ich eine Montierung mit einer guten Nachführung und letztlich auch AutoGuiding um auf schön lange Belichtungszeiten zu kommen.
Für meine Astrofotografiererei mit Digitalkamera (sog. “wide-field”) wünsche ich mir eine Montierung mit motorisierter Objekt-Positionierung und guter Nachführung; d.h. eine sog. Goto-Montierung.
Da alles durch Computer gesteuert wird, gibt es solche GoTo-Montierungen sowohl als azimutale Montierung (AZ, Gabel) als auch als parallaktische Montierung (EQ, German). Allerdings wird allen AZ-Montierungen nachgesagt, dass sie sich für Astrofotografie nicht so eignen, da sie eine deutliche Bildfeld-Rotation zeigen. Dann wäre vielleicht eine parallaktische wie z.B. die iOptron SmartEQ gut. Nachteil von parallaktischen Montierungen ist, das man sie genau auf den Himmelspol ausrichten muss (s. Einnorden, Polar Alignment).
Anforderungen an eine computergesteuerte Montierung für Astrofotografie
Die Montierung soll per Auto gut transportabel sein (um bessere Beobachtungsorte zu erreichen)
Achsen parallaktisch
Beleuchtetes Polsucher-Fernrohr
Elektrische Motoren in zwei Achsen
Elektrische Nachführung
Elektrisches Ansteuern der Beobachtungsobjekte sog. GoTo
Anschluss von Foto-Kamera bzw. Teleskop per Vixen-Prismenschiene
Externe Stromversorgung mit 12 Volt
ST4-Anschluss für Auto-Guiding
Kamera-Anschluss per Vixen-Prismenschiene
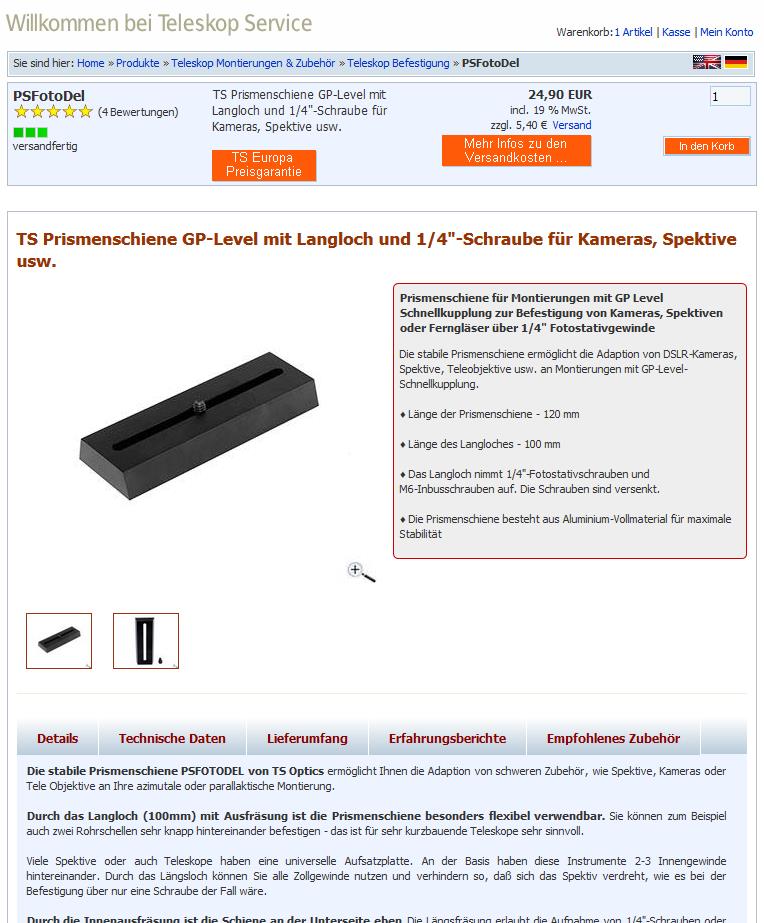
Man kann eine Digital-Kamera (DLSR) ganz alleine auf die Montierung setzen mit dieser Prismenschiene GP-Level, die auf übliche Montierungen (mit Vixen-Klemme) passt. Man hätte dann den Komfort des motorischen Schwenkens per Handbox-Tasten und die elektrische Nachführung.
iOptron SkyGuider: EUR 621,– Basisplatte 3/8″ für Fotostativ, Nachführung um eine Achse (RA), beleuchteter Polsucher, ST-4 Autoguiding-Anschluss, 3.5 kg Zuladung, Transportkoffer
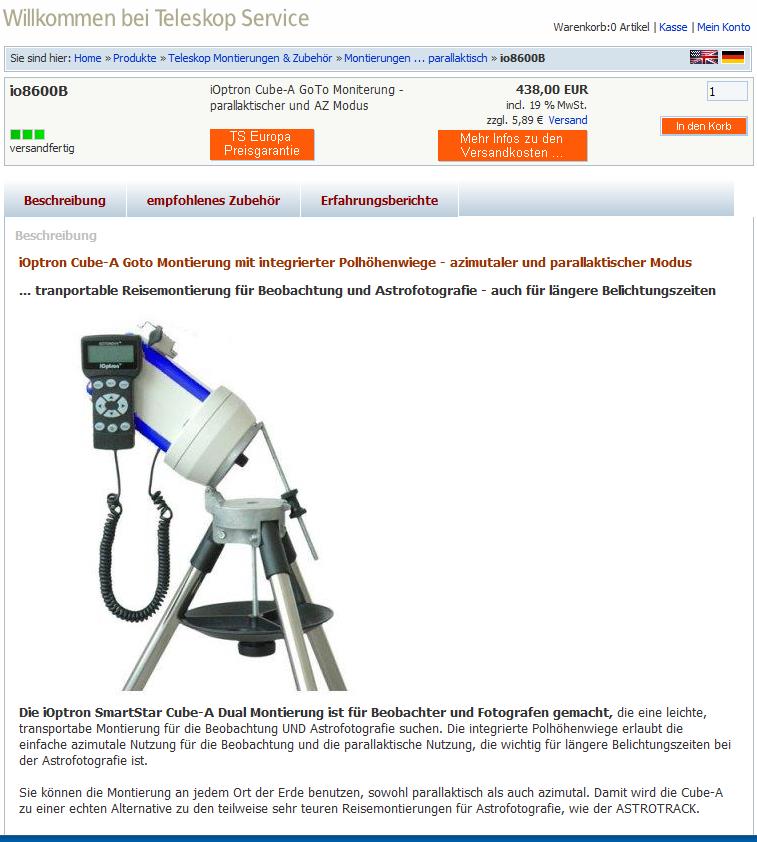
iOptron Cube-A: EUR 438,– Inkl. Astro-Stativ, Nachführung AZ und EQ , dual-axis Servo-Motor, Gegengewicht als Zubehör, KEIN Polsucher, KEIN ST-4 (evtl. Adapter als Zubehör), 2.5 kg Zuladung EQ, GPS, GoTo, Handbox GoToNova 8401 mit USB-Schnittstelle für ASCOM, Vixen-Prismenklemme
iOptron SmartEQ Pro 3200: EUR 692,– Inkl Astro-Stativ, Nachführung EQ, dual-axis Servo-Motor, inkl. Gegengewicht, beleuchteter Polsucher, ST-4 Autoguiding-Anschluss, 5 kg Zuladung, KEIN GPS, GoTo, Handbox GoToNova 8408 mit serieller Schnittstelle für ASCOM, Vixen-Level Prismenklemme und Basisplatte 3/8″ für Stativ, Transportkoffer
iOptron Sky Guider
Abbildung 2: iOptron Sky Guider (pCloud: skyguider-with-camera.jpg)
iOptron Sky Guider with camera
Ich habe mir 2012 eine iOptron SkyTracker angeschafft, um eine mobile Nachführungsmöglichkeit für meine Astro-Aufnahmen mit dem Fotoapparat (Sony NEX-5R) zu haben.
Die SkyTracker soll auf ein stabiles Fotostativ (Dreibein, Tripod) montiert werden.
Man sagt, dass der Stativkopf exakt waagerecht ausgerichtet sein soll. Dass kann ich mit einer kleinen Wasserwaage / Libelle prüfen und ggf. die Stativbeine leicht ‘rauf bzw. ‘runter schieben.
Dann kann die SkyTracker auf den Stativkopf gesetzt werden und bereits am Tage eine grobe Ausrichtung nach Norden und auf die Polhöhe (geografische Breite) vorgenommen werden.
Stromversorgung
Den elektrischen Strom bekommt die SkyTracker entweder über einzusetzende 4 kleinen Akkus (was recht wackelig ist) oder extern über einen 12V-Stecker zu einem Netzgerät Auto-Zigarettenanzünder, Powertank oder dergleichen.
Grundvoraussetzung: Einnorden – Polar Alignment
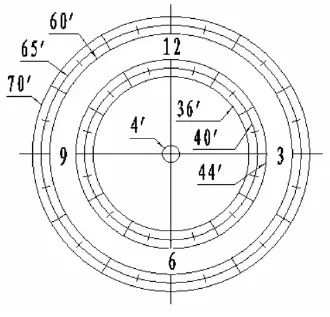
Grundvoraussetzung für eine genaue Nachführung mit dem SkyTracker ist die genaue Einnordung. Der SkyTracker hat ein beleuchtetes Polsucher-Fernrohr, was auf der Nordhalbkugel eine wirklich gutes “Polar Alignment” ermöglicht.
Der Polarstern (Alpha UMi, 1.97 mag) kann sehr leicht im Polsucher gefunden werden.
Zur Feineinstellung setzte ich dann den Polarstern (Polaris) auf den inneren Teilkreis im beleuchteten Polsucher und zwar genau in Richtung auf Kochab (Beta UMi, 2.1 mag).
Damit ist eine sehr präzise parallaktische Ausrichtung des SkyTracker erreicht (dann den SkyTracker festschrauben und nicht mehr anstossen).
Dies nennt man auch die “Kochab-Methode” (die ich so von AstroHardy gelernt habe).
Die Prozedur dauert zwar nicht sehr lange, trotzdem muss man sich den Kopf ganz schön verrenken, wenn man das nicht klug plant. Ich stelle mir die Höhe des Dreibein-Stativs, auf dem die SkyTracker sitzt, so ein, dass ich im Sitzen auf einen Gartenstuhl bequem und mittig durch das Polsucherfernrohr schauen kann.
Genauigkeit der Nachführung
Bisher hatte ich mit meiner Sony NEX-5R maximal 30 Sekunden belichtet und dabei Objektive von 16mm (Zenitar – z.B. Perseiden), 24mm (Vivitar – z.B. Nordlicht) und 50mm (Olympus – z.B. Magellansche Wolke) benutzt. Da war die Nachführgenauigkeit der SkyTracker überhaupt kein Problem.
Aber die Anforderungen an die Genauigkeit sind bei mir durch zwei Entwicklungen gestiegen:
Ich habe ein Objektiv mit wesentlich längerer Brennweite bekommen: Takumar 135mm f/3.5
Ich habe herausgefunden, wie dich länger als 30sec belichten kann. 30sec maximal macht die Sony NEX-5R per Programm mit Smart Remote. Langzeitbelichtung per Bulb geht dann mit einem Infrarot-Fernauslöser
SkyTracker mit 135mm Objektiv
Probefotos mit dem 135mm Objektiv bei 120sec Belichtung: Das Gesichtsfeld des 135mm-Objektivs mit dem APS-C-Sensor ist ca. 9,9 Grad mal 6,6 Grad.
Die Kamera ist ungefähr horizontal ausgerichtet und zeigt auf den auf der Deichsel stehenden Großen Wagen. Der helle Stern ist Alioth (Epsilon UMa, 1.76 mag).
Ohne Nachführung bekomme ich also Sternspuren als richtige Striche. Die Qualität der Nachführung ist bei dieser Deklination (56 Grad) ausreichend.
Abbildung 3: 120 sec mit Nachführung (pCloud: DK_20170721_01769.jpg)
Testfoto: 120 sec , f=135mm mit Nachführung durch iOptron SkyTracker
Abbildung 4: 120 sec ohne Nachführung (pCloud: DK_20170721_01770.JPG)
Testfoto ohne Nachführung: 120 sec, f=135 mm
SkyTracker mit 500mm Russentonne
Auf meinem SkyTracker kann ich auch eine Russentonne plus Kamera montieren. Ich will mal testen, wie gut die Nachführung dann ist, soll heissen, wie lange kann ich belichten, wenn alles gut ausgerichtet ist?
Abbildung 5: Russentonne mit f=500mm, 68 sec, ISO 100 (pCloud: Russentonne_35915928412_aa20894113_o.jpg)
Testfoto mit Russentonne: Alpha und Rho Geminorum: Belichtung 68 sec, ISO 100
Nachführung ist wohl OK. Fokussierung ist schlecht.
Abbildung 6: Russentonne mit f=500mm, Belichtungszeit: 126 sec, ISO 100 (pCloud: Russentonne_35244462984_c754c5def3_o.jpg)
Testfoto mit Russentonne: Castor: 126 sec, ISO 100
Nachführung mit dem iOptron SkyTracker scheint OK zu sein.