Gehört zu: Teleskope
Siehe auch: Auffinden / Suchen, Liste meiner Geräte, Fokussieren, Polar Alignment, Mindmap Astrofotografie
Benutzt: Fotos von pCloud
Stand: 10. Okt 2022
Die Aufgabe: Wie stelle ich das Beobachtungsobjekt in das Gesichtsfeld ein?
Das ist manchmal gar nicht so einfach. Als ich das erste Mal die Große Magelansche Wolke fotografieren wollte, hatte ich das Problem, das ich das Biest mit bloßem Auge nur sehr schwach sehen konnte und die Ausrichtung der Kamera (Sony NEX-5R auf Kugelkopf) war mühsam.
Bei der Astrofotografie bedarf es zweier Fähigkeiten für einen Regelkreis zur Positionierung (das Einstellen eines Bildausschnitts wird “Framing” genannt):
- Erkennen wie mittig das (evtl. kaum sichtbare) Beobachtungsobjekt im Gesichtsfeld “sitzt”? (Feststellen Differenz Soll-Ist)
- Verstellen der Ausrichtung der Kamera / des Teleskops (Verändern Ist in Richtung Soll)
Die Ausrichtung auf ein Beobachtungsobjekt wird auch engl. gern “Pointing” genannt. Neben dem manuellen ggf. durch Technik unterstütztem Pointing gibt es das vollautomatische computergestützte Pointing, was auch gerne “Goto” genannt wird.
Wo genau steht das Beobachtungsobjekt?
Aus der lokalen Sternzeit kann man leicht die Position eines Objekts am Himmel berechnen als Deklination und Stundenwinkel und dann mit einer richtig aufgestellten (s. Polar Alignment) parallaktischen Montierung auf das Objekt fahren.
Wenn man es ganz genau machen will, muss man allerdings ein paar “Kleinigkeiten” zusätzlich berücksichtigen:
- Präzession (50″ / Jahr) –> J2000 vs. JNow
- Nutation
- Jährliche Abberation
- Eigenbewegung des Objekts
- Geografische Position des Beobachters
- Atmosphäre
Genauigkeit des Pointing
Die Genauigkeit einer Pointing-Methode wird als “mittlere” Abweichung der Teleskop-Position von der Objekt-Position angegeben, wobei “mittlere” gern als “RMS” (Root Mean Square, Wurzel aus dem Mittelwert der Abweichungsquadrate) bezeichnet wird; d.h. 60% der Messungen leigen unterhalb von RMS. Im Amateurbereich wird eine RMS von 30″ als hervorragend angesehen.
Erforderliche Genauigkeit – Gesichtsfeld
Praktisch hängt die Genauigkeit mit der auf das Beobachtungsobjekt positioniert werden soll wesentlich von der Größe des Gesichtsfelds des verwendeten Objektivs ab. Eine Genauigkeit von 20% des Gesichtsfeldes würde ich für gut halten, 10% wären ein sehr guter Wert.
- LidlScope 700mm mit APS-C-Sensor: 1,9 x 1,3 Grad –> sehr gute Ausrichtung: 11′
- Russentonne 500mm mit APS-C-Sensor: 2,7 x 1,8 Grad –> sehr gute Ausrichtung: 16′
- Beroflex 300mm mit APS-C Sensor: 4,5 x 3,0 Grad –> sehr gute Ausrichtung: 27′
- Takumar 135mm mit APS-C-Sensor: 9,9 x 6,6 Grad –> sehr gute Ausrichtung: 59′
- Olympus G.ZUIKO 50mm mit APS-C-Sensor: 26,6 x 17,7 Grad –> Objekt LMC –> sehr gute Ausrichtung: 2,7°
- Vivitar 24mm mit APS-C-Sensor: 52,2 x 36,0 Grad –> Objekte Polarlichter, Milchstraße –>sehr gute Ausrichtung: 5,2°
Techniken zur Positionierung auf das Beobachtungsobjekt
Technik #1: Positionieren mit Live-View und höherer ISO-Einstellung
Beispiel “Großen Magellanschen Wolke” in Trafalgar
Mit einer höheren ISO-Einstellung wird das etwas schwache Objekt dann im Live View gut sichtbar.
Es bleibt das Problem des feinen Verstellens der Kamera-Richtung. Auf einem gewöhnlichen Kugelkopf ist das fummelig, weil man nicht in einer Richtung hin und her stellen kann – und damit leider nicht Fehler leicht korrigieren kann. Besser wäre ein Kopf mit dem ich in zwei festen Achten fein hin und her stellen kann – so etwas nennt man “Neigekopf“.
Technik #2: Positionieren mit einem konventionellen Sucherfernrohr
Z.B. Kleines Sucherfernrohr TS-Optics 6×30 gradsichtig
Wichtig ist es, den Sucher parallel zum Hauptfernrohr einzustellen. Wenn man im Hauptteleskop einen Stern mittig im Gesichtsfeld eingestellt hat, kann man das Sucherfernrohr so justieren, dass der gleiche Stern ebenfalls mittig dort im Fadenkreuz steht. Damit man in der dunklen Nacht nicht zuviel herumprobieren muss, empfiehlt es sich diese Justage des Suchers schon am Tage an einem entfernten Objekt “grob” vorzunehmen.
So ein “optischer” Sucher kann z.B. dazu dienen, einen hellen Stern einzustellen, an dem man dann die genaue Fokussierung vornimmt.
Technik #3: Positionieren per Goto-Funktion der Montierung
Eine gut funktionierende motorische Goto-Montierung ersetzt den Sucher. Man benötigt keinen Sucher mehr und kann ihn verkaufen :-). Deshalb habe ich mir die iOptron SmartEQ Pro gekauft. Seit Juli 2017 habe ich auf eine Skywatcher HEQ5 Pro aufgerüstet. Allerdings ist jedesmal ein Goto Alignment erforderlich, wo man auch Sterne in das Zentrum des Gesichtsfelds stellen muss. Dafür benötigt man ggf. doch einen Sucher.
Technik #4: Positionieren mit Platesolving
Da ich meine Astrofotos sowieso mit dem Windows-Computer und entsprechender Aufnahme-Software, wie APT, Sequence Generator Pro, AstroTortilla, mache, ist für mich das bequemste das Platesolving. Durch so ein Platesolving wissen wir also genau, wohin unsere Kamera (unser Teleskop) in dem Moment der Aufnahme (“Ist-Position”) zeigt.
Damit das motorische Goto der Montierung funktioniert, ist es zusätzlich erforderlich, dass die Montierung in Information hat, wohin sie zeigen sollte (“Soll-Position”). Erst dann kann man per SYNC beides zur Deckung bringen.
Welche Soll-Position die Montierung als Information hat, kann uns beispielsweise ein Planetariumsprogramm wie Cartes du Ciel zeigen.
Technik #5: Positionieren mit dem Leuchtpunktsucher
Hierzu habe ich einen separaten Artikel geschrieben: Leuchtpunktsucher
Technik #6: Positionieren mit einem Elektronischer Sucher / Digitaler Sucher
Als elektronischen Sucher habe ich mir eine USB-Kamera “Altair GP-CAM” gekauft und dazu ein Objektiv mit f=12mm. Das ergibt ein Sucher-Gesichtsfeld von 23° x 17°. das ich im Live View per Software (z.B. SharpCap) auf meinem Windows-Computer betrachten kann. Bei ShapCap kann ich auch ein Fadenkreuz einblenden. Zu perfekten Glück fehlen dann noch:
- Der Montagekopf (Zwei-Wege-Neiger) muss eine feinfühlige Richtungsverstellung in zwei festen Achsen ermöglichen
- Die Aufnahmeoptik muss parallel zum elektronischen Sucher ausgerichtet sein
Diese Technik verwende ich nicht, da es mit Technik #4 (Platesolving) super einfach und schnell geht.
Beispiele zur Positionierung auf Beobachtungsobjekte
Olympus G.ZUIKO f=50mm mit Sony NEX-5R z.B. LMC
Am 1.3.2014 konnte ich die Große Magellansche Wolke (Large Magellanic Cloud = LMC) von Trafalgar, Südafrika aus fotografieren.
Damit das Beobachtungsobjekt (die LMC) schön in die Bildmitte kommt, mussten zuerst Anfnahmen mit hoher ISO gemacht werden, damit das Beobachtungsobjekt auf dem Bildschirm sichtbar wird.
Abbildung 1: Große Magellansche Wolke (pCloud: DK_20140301_lmc2_3_beschriftet.jpg)

Trafalgar: LMC Large Magellanean Cloud
Objekte finden mit Russentonne f=500mm und Sony NEX-5R
Das Gesichtsfeld der Russentonne ist klein (1,8 x 2,7 Grad). Es wird schwierig werden, damit gut auf ein Beobachtungobjekt zu positionieren. Ich habe ja meinen Rotpunkt-Sucher, der auf dem Blitzschuhschlitten der Kamera sitzt. Das passt auch mit der Russentonne.
Mit dem Rotpunktsucher sollte eine grobe Positionierung auf ein Objekt möglich sein. Eine Feinpositionierung müsste mit dem Smart Remote Contol und dem Live View auf dem iPad möglich sein, wenn man vielleicht das ISO für diesen Zweck etwas aufdreht. Bei mit sitzt die Russentonne allerdings auf einem Kugelkopf, der auf der Nachführung SkyTracker sitzt. Mit dem Kugelkopf ist eine solche “Feinpositionierung” nur ganz schwer möglich.
Objekte finden mit Takumar f=135mm und Sony NEX-5R
Wir gehen von folgendem Szenario aus:
- Aufnahmekamera: Sony NEX-5R mit Objektiv Takumar 135mm (=> Gesichtsfeld 9,9° x 6,6°) und Smart Remote Control per iPad
- Sucherkamera: GP-CAM mit Objektiv f=12mm angeschlossen per USB an Notebook (=> Gesichtsfeld 22° x 17°)
- Montierung: iOptron SmartEQ pro – parallaktisch – mit zwei Servomotoren (Stellmotoren)
- PC (Notebook) mit Windows 10 & SharpCap
Abbildung 2: Der Aufbau sieht so aus (pCloud: DK_20160531_iOptron_0638.jpg)

iOptron SmartEQ, Sony NEX 5R mit 135mm Takumar und GP-CAM als elektronischem Sucher
Schritt 1: Vorbereitung am Tage:
- Batterie der Kamera: Aufladen und Ersatzbatterie bereitlegen
- Kamera: Sensor reinigen
- Batterie des iPads: Aufladen und ggf. Mobil-Akku bereitstellen
- 12V-Akku für Montierung: Aufladen und Kabel bereitlegen
- Notebook-Computer: Batterie aufladen
Schritt 2: Justieren so dass Sucher und Aufnahmekamera parallel:
- Gleich nach dem Einnorden kann der Polarstern benutzt werden, um die Parallelität der beiden Geräte zu justieren
- Beide Geräte werden fokussiert, sodass die Sterne scharf zu sehen sind
- Fadenkreuz wird auf beiden Geräten angeschaltet..
- Sony PlayMemories Mobile: Einstellungen => Gitterlinie => 4×4 Raster + Diagonale
- SharpCap: Tool-Leiste: Switch between different styles of reticule overlay
Abbildung 3: SharpCap with reticule overlay (pCloud: SharpCap_Reticule.jpg)
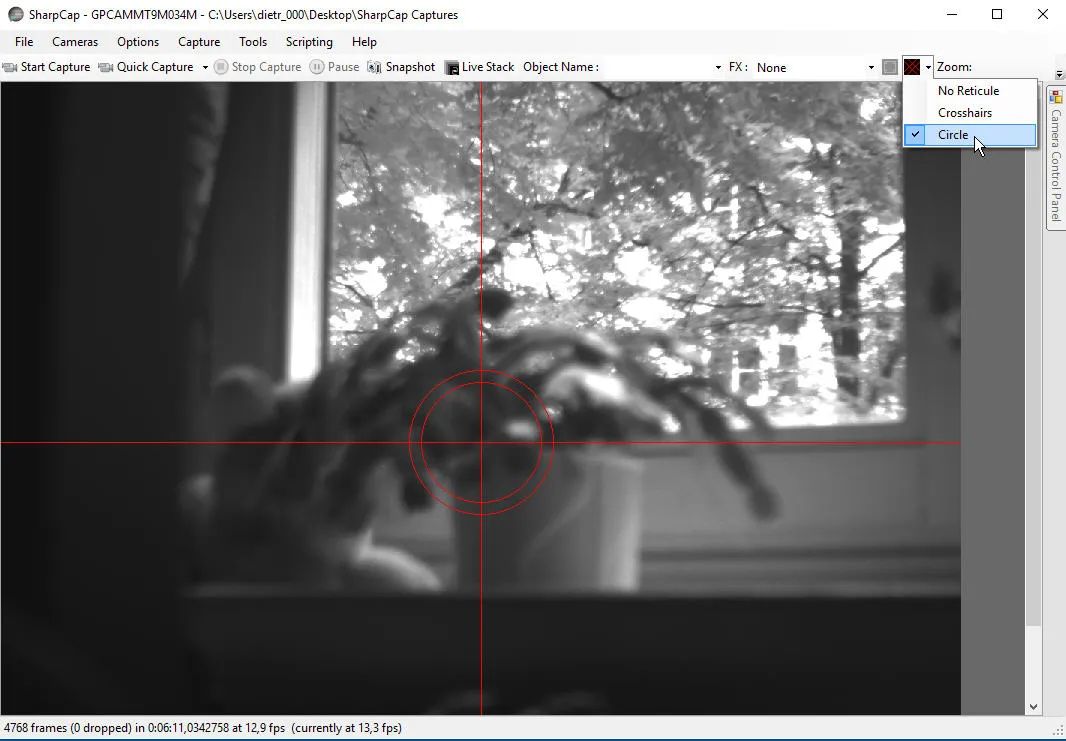
SharpCap Recticule (Fadenkreuz)
Sony PlayMemories Mobile: Einstellungen Gitter:
Abbildung 4: Sony PlayMemories auf dem iPad (pCloud: iPad_PlayMemoriesGitter.jpg)
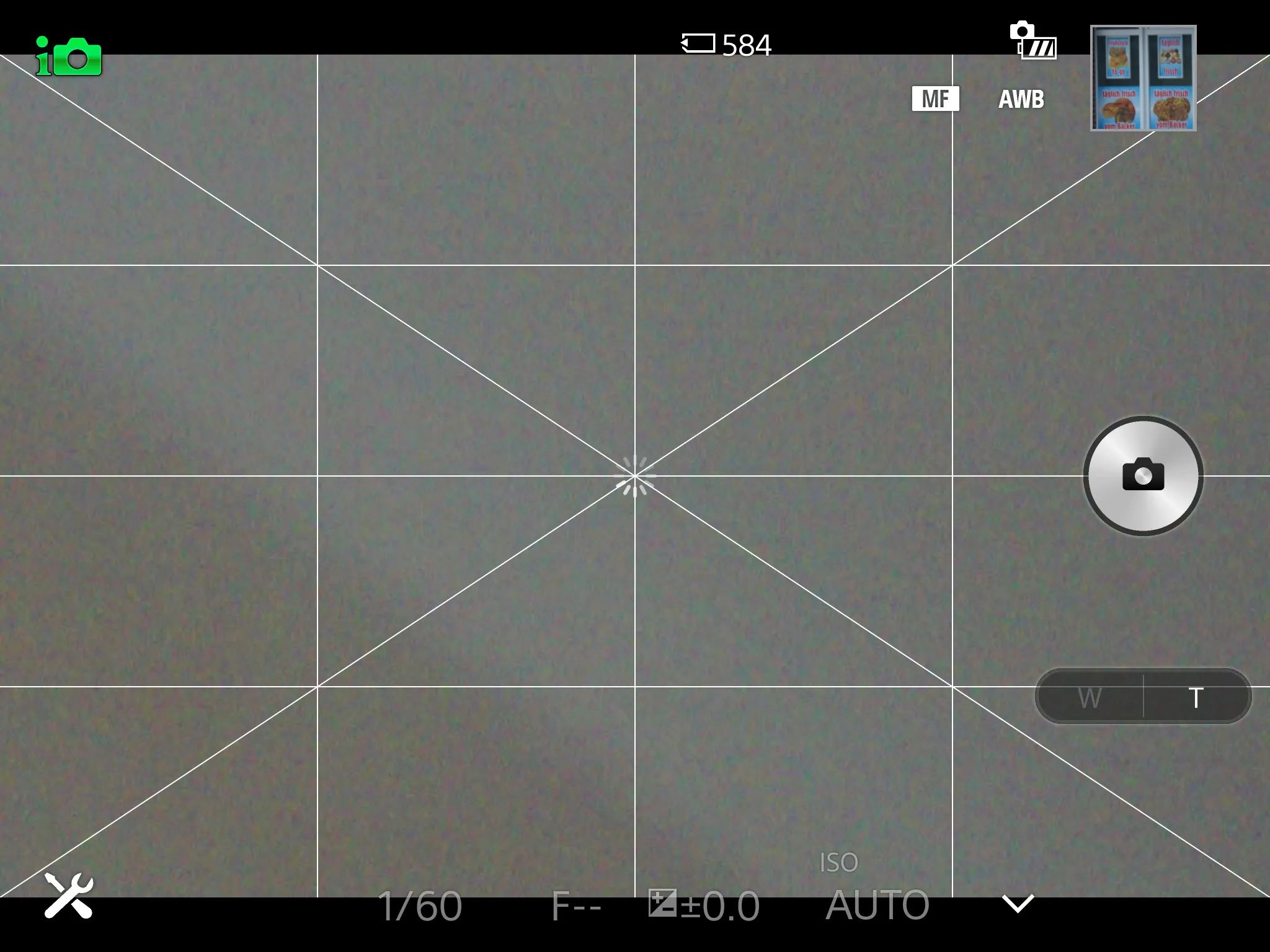
Sony Software auf iPad Gitter mit Fadenkreuz
Im Prinzip funktioniert nun mein elektronischer Sucher: ich kann ein Objekt ins Gesichtsfeld des Suchers einstellen und bei der Kamera sollte es dann auch im Gesichtsfeld sein.
Schritt 3: SharpCap Einstellungen für optimalen Sucher
Ich muss mein SharpCap nur noch so einstellen, dass schön viele Sterne auf dem Notebook-Bildschirm sichtbar werden.
Das Minimum-Ziel ist es, Sterne bis 4. Größenklasse im Sucher (Notebook Bildschirm) gut sichtbar zu machen.
Dazu stelle ich für meine Altair GPCAM in SharpCap folgendes ein:
- Einzelbild (“still”)
- Belichtungszeit: 5 sec
- Gain: so hoch wie möglich (solange das Bild nicht zu hell wird)
- XYZ: ?????
yyyyyy