Methoden zum Polar Alignment – Einnorden – Einsüden
Wenn ich eine äquatoriale (parallaktische) Montierung habe, so muss diese “Eingenordet” werden, d.h. die Stundenachse der Montierung muss parallel zur Drehachse der Erde ausgerichtet werden.
Wenn die Montierung dauernd an einem festen Platz aufgestellt ist, d.h. “stationär“, muss man das vielleicht einmal im Jahr machen und es macht nichts aus, wenn das etwas dauert und evtl. auch einige Verrenkungen erfordert. Wenn die Montierung “mobil” ist, also Tag für Tag an wechselnden Orten neu aufgestellt wird, möchte man die Einnordung möglichst in kurzer Zeit und ohne körperliche Belastungen durchführen können.
Eine weitere Frage bei der Einnordung ist die anzustrebende Genauigkeit. Dabei wäre die Frage, welche Auswirkungen eine fehlerhafte Polausrichtung auf das geplante astronomische Vorhaben hätte.
Bei rein visueller Beobachtung muss die Genauigkeit nicht besonders groß sein.
Beim Fotografieren hängt die erforderliche Genauigkeit der Poljustierung von der Art der Nachführung (nur Rektaszension, auch Deklination) der Genauigkeit der Nachführung durch die Montierung, sowie von Belichtungszeit, Brennweite, Pixelgröße, Sensor-Größe etc. ab. Beispiel: Ein Fehler in der Polausrichtung um 60 Bogenminuten ergibt für ein Objekt am Himmelsäquator (Dekl.=0 Grad) ohne Autoguiding nur mit dem Tracking der äquatorialen Montierung eine maximale mittlere Drift von 60 Bogenminuten in 6 Stunden; also 10 Bogensekunden pro Minute Belichtungszeit (bei anderen Deklinationen: Cosinus).
Die Genauigkeit der Nachführung durch die Montierung (nur Tracking, nicht Autoguiding) lässt sich mit dem Guiding Assistent von PHD2 Guiding sehr schön visualisieren…
Einen Überblick über verschiedene Methoden zur Polausrichtung habe ich in einem separaten Beitrag versucht. Dort habe ich auch berechnet, welche Auswirkungen eine ungenaue Polausrichtung (also wie viele Bogenminuten zeigt die Drehachse meiner Montierung neben den Himmelspol) hat.
Begonnen habe ich mein Einnorden mit dem Polfernrohr meiner Montierung und der sog. Kochab-Methode, die ich von Hartwig Lüthen bei der GvA gelernt hatte.
Meine Montierung ist “mobil” und wird praktisch ausschließlich zur Astrofotografie benutzt. Deshalb muss die Genauigkeit meiner Polausrichtung schon recht gut sein (besser als 2′) und es sollte schnell und bequem gehen. Daher habe ich als zweiten Ansatz dann die Polausrichtung mit QHY PoleMaster gemacht – was hier im Norden sehr gut ging, aber teuer war.
Die QHY PoleMaster war nicht nur recht teuer, sondern beim Verfahren zur software-gestützten Polausrichtung musste man quasi manuell Sternmuster in der Polnähe erkennen – ein richtiges Plate Solving war das nicht. Als SharpCap mit einer echten Plate-Solving-Methode zum Polar Alignment heraus kam, habe ich das ausprobiert und bin jetzt dabei geblieben. Meinen QHY PoleMaster habe ich gebraucht verkauft.
Neuerdings gibt es ein Plugin für N.I.N.A. mit dem man auch ohne ein zusätzliches Guiding-Rohr und ohne notwending einen freien Blick auf en Himmelspol zu haben sehr gutes und schnelles Polar Alignment machen kann.
Polar Alignment mit SharpCap
Polar Alignment ist ein neues Feature in SharpCap 2.9. Die Idee war inspiriert durch PhotoPolarAlign, eine Software von Themos Tsikas. Themos war so freundlich, beim Testen zu helfen und machte auch Verbesserungsvorschläge während der Entwicklung des Polar Alignment Features von SharpCap.
Ich verwende jetzt (Dezember 2019) die Version SharpCap Pro. Diese ist kostenpflichtig mit Eur 12,– pro Jahr. Um das kostenlose SharpCap auf das kostenpflichtige SharpCap Pro “aufzurüsten” muss man einen Lizenzschlüssel, den man nach der Bezahlung per E-Mail bekommt in SharpCap unter “Help” eingeben.
Mit der kostenlosen SharpCap-Version kann man das Polar Align “antesten” – für die Stufe “Final Step: Adjust Mount” (s.u.) ist dann aber die kostenpflichtige Lizenz erforderlich.
Wenn das Lizenz-Jahr abgelaufen ist, kann man seine Lizenz kostenpflichtig verlängern (dafür bekommt man in der Regel Freimonate) – ansonsten können die lizenzpflichtigen Features (wie Polar Alignment) nicht mehr benutzt werden.
Die kostenpflichtige Pro-Version hat ausser der Funktion “Polar Align” noch andere zusätzliche Funktionen, die für den Einen oder Anderen interessant sein könnten.
Optik mit Brennweite f=200mm –> nehme da mein Guiding-Rohr GuideScope50
Kamera mit einem Gesichtsfeld (FoV) zwischen 1 Grad und etwa 5 Grad –> meine GPCAM hat ein FoV von 1,54 x 1,16 Grad
Grobes Polar Alignment der Montierung auf plus-minus 5 Grad
Etwa 10-15 Sterne im Gesichtsfeld der Kamera zu sehen (erforderlich ist also eine freie Sicht auf die Gegend des Himmelspols)
SharpCap mit eingerichtetem PlateSolving (die Funktion “Polar Alignment” sollte sogar ohne dieses allgemeine Plate Solving gehen)
In welchen Schritten läuft das Polar Alignment mit SharpCap ab?
Schritt 0: Montierung aufstellen
Die Montierung sollte schön waagerecht aufgestellt sein, dann würde nämlich die Azimut-Schraube wirklich nur das Azimut bewegen und nicht auch noch so nebenbei die Polhöhe…
Teleskop in “Home”-Position d.h. Gegengewicht nach unten, Teleskop nach oben, Deklination 90 Grad.
Eine grobe Ausrichtung (5 Grad genau) auf den Himmelspol sollte ebenfalls schon gemacht sein.
Das für die Polausrichtung verwendete kleine Teleskop (z.B. das Guiding-Rohr) muss nicht genau parallel zum Hauptrohr ausgerichtet sein. SharpCap verwendet ja die tatsächliche Rotationsachse der Montierung.
Schritt 1: SharpCap einrichten
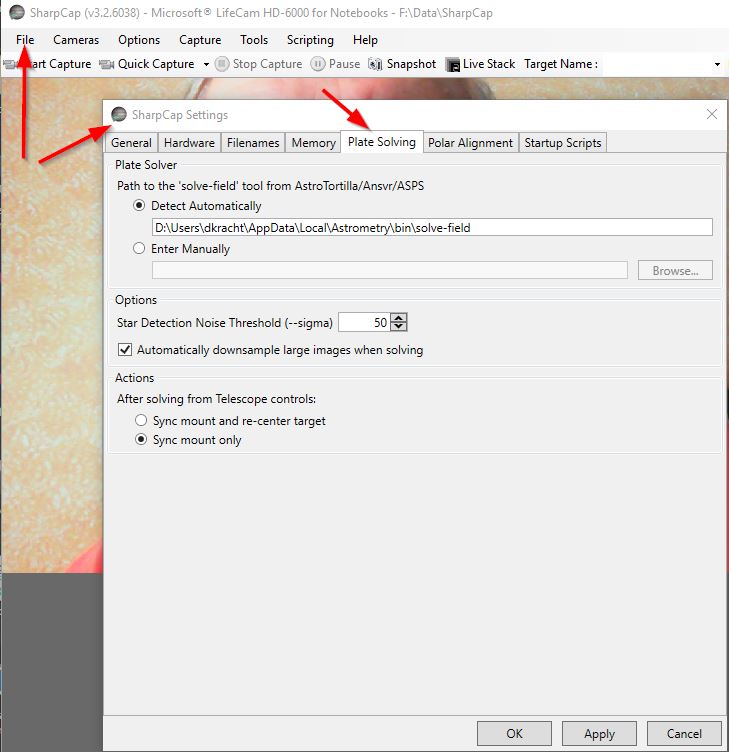
Da SharpCap beim Polar Alignment ja ein funktionierendes Plate Solving voraussetzt, müssen wir dafür die richtigen Einstellungen überprüfen:
In der SharpCap-Menüleiste auf: “File –> SharpCap Settings” gehen.
Dort auf den Reiter “Plate Solving”
Dort unter “Options” die “Star Detection Noise Threshold” auf 10 oder kleiner einstellen.
Zur Sicherheit könnte man das Plate Solving mit SharpCap auch einmal so, also ohne Polar Alignment, ausprobieren.
Für das Polar Alingment benutzt SharpCap einen “eingebauten” Plate-Solving-Algorithmus, für den keine Internet-Verbindung und auch kein anderes Programm oder Datenbank installiert werden muss.
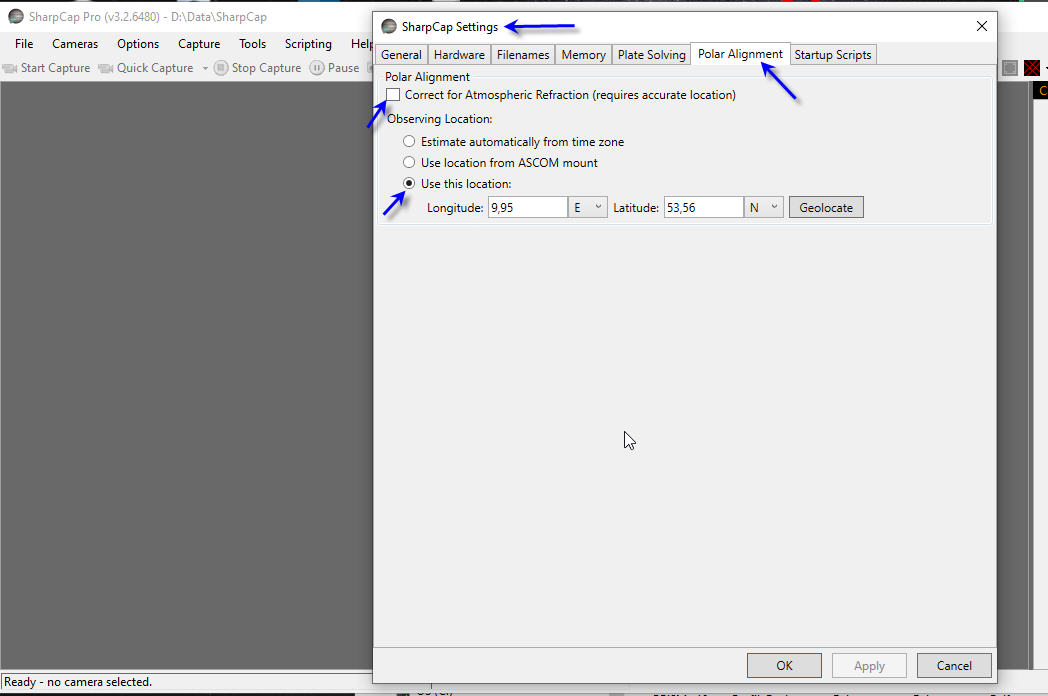
In den Einstellungen (Settings) von SharpCap sollten als Erstes die Einstellungen für “Polar Alignment” überprüft werden.
Correct for Atmospheric Refraction sollte bei Vergleichen mit anderer Software ausgestellt sein, weil Vergleichsoftware so eine Einstellung meist nicht hat.
Die “Obseving Location” sollte ordentlich eingestellt sein
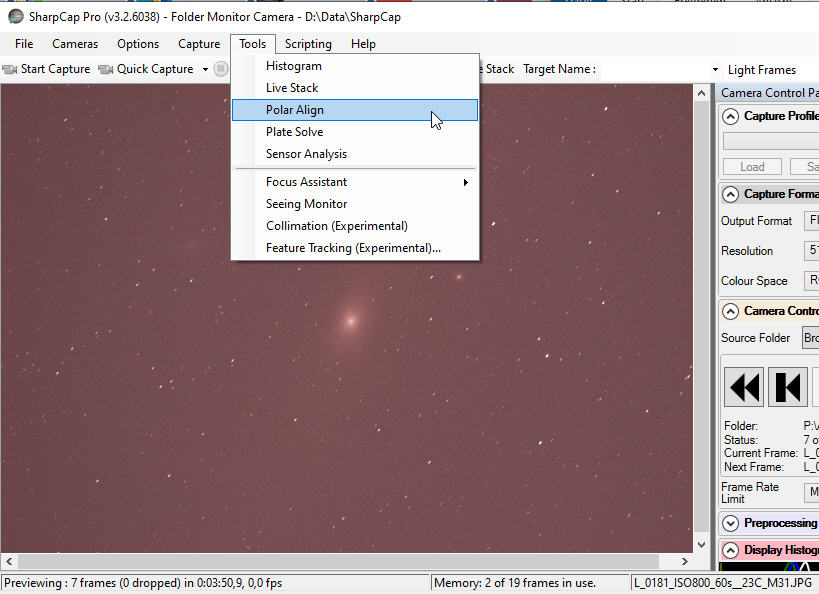
Wenn ich im SharpCap-Menü auf “Tools -> Polar Align” gehe, bekomme ich eine Erklärung (Introduction) . Diese Introduction sollte man ruhig mal durchlesen…
Nachdem ich das alles gelesen habe klicke ich auf die Schaltfläche “Weiter” (Next).
Schritt 4: Erstes Bild aufnehmen
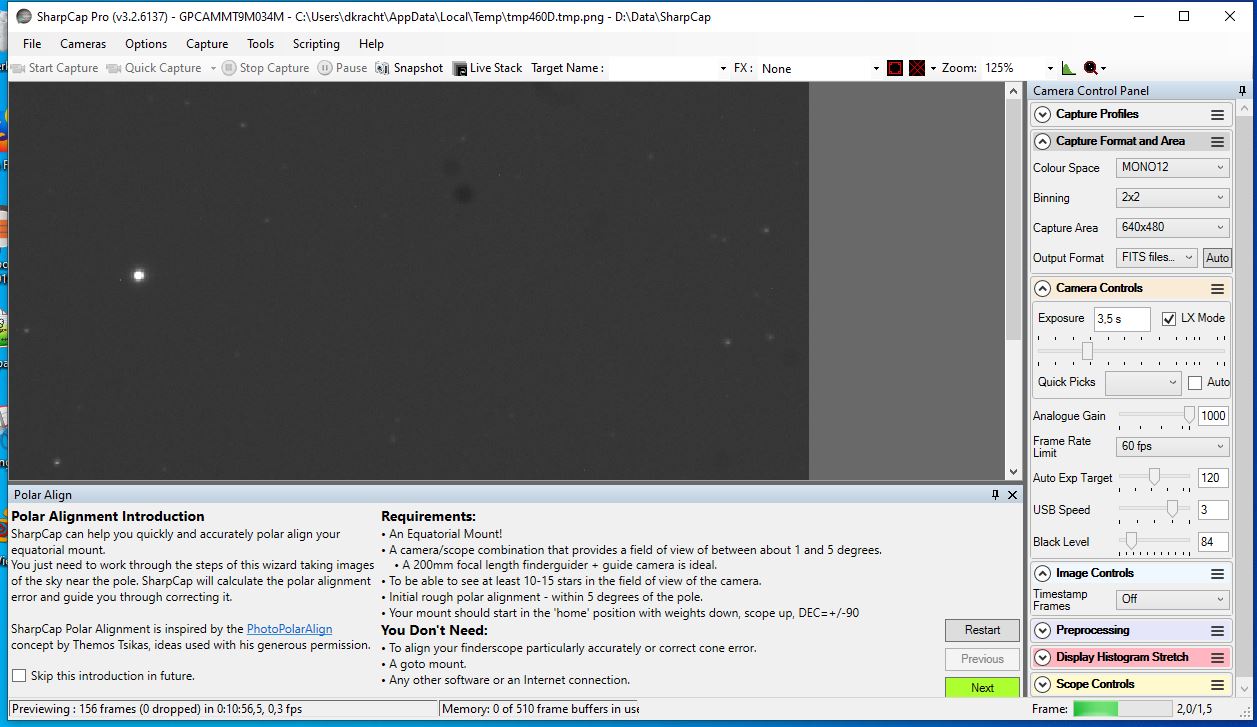
Bevor SharpCap die erste Aufnahme macht, sollten wir die Belichtungszeit und den Gain so gut einstellen, dass tatsächlich 10-15 Sterne im Gesichtsfeld zu sehen sind. Im Beispiel habe ich eingestellt: 3,5 Sekunden Belichtungszeit und den “Analogue Gain” auf Maximum.
Natürlich sollte die Kamera einigermassen im Fokus sein.
Nachdem wir bei der “Introduction” auf “Next” geklickt haben startet die erste Aufnahme und das Plate Solving.
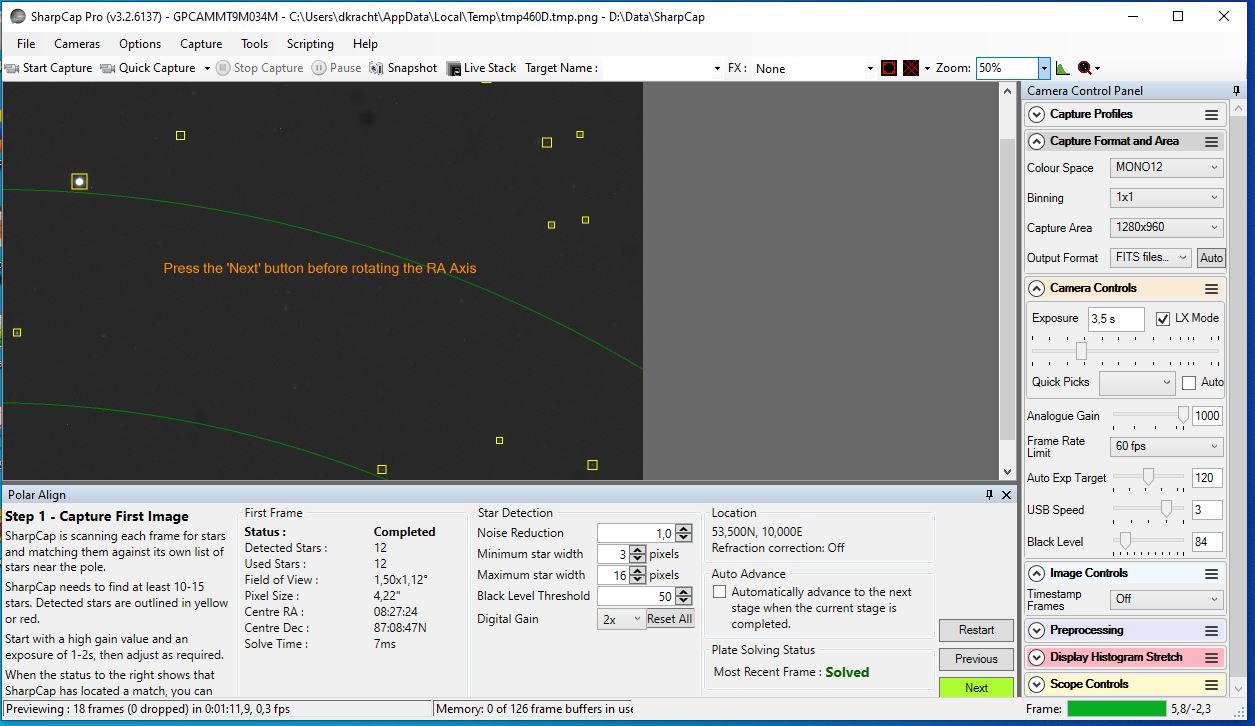
Abbildung 4: SharpCap Capture First Image (pCloud: SharpCap23.jpg)
Hier im “Step 1 – Capture First Image” haben wir noch die Möglichkeit, einige Parameter für das Plate Solving einzustellen. Beispielsweise Minimum und Maximum Star Width.
Die im Bild erkannten Sterne markiert SharpCap mit einem Kästchen (“detected stars”). Dabei werden mit einem gelben Kästchen die Sterne markiert, die dann zum Plate Solving verwendet (“used stars”).
Die Kreisbögen im Bild sind Deklinationskreise um den Himmelspol.
Dieser Schritt ist erfolgreich zu Ende, wenn unter Status das Wort “Working” in “Solved” umspringt.
Dann klicken wir auf die Schaltfläche “Next”.
Schritt 5: Stundenachse drehen und zweites Bild aufnehmen
Nachdem im vorigen Schritt das erste Bild erfolgreich aufgenommen und “gesolved” wurde, hatten wir dort auf die Schaltfläche “Next” geklickt und SharpCap möchte nun ein zweites Bild aufnehmen.
Aber vorher soll man die Montierung um ca. 90 Grad in der Stundenachse drehen.
SharpCap macht dann die zweite Aufnahme und davon wiederum ein Plate Solving.
Aus dem ersten und dem zweiten Foto errechnet SharpCap die Position der Drehachse der Montierung und damit wissen wir (bzw. SharpCap), wie weit wir noch weg sind vom Himmelspol (“Polar Align Error”). Danach klicken wir auf die Schaltfläche “Next”.
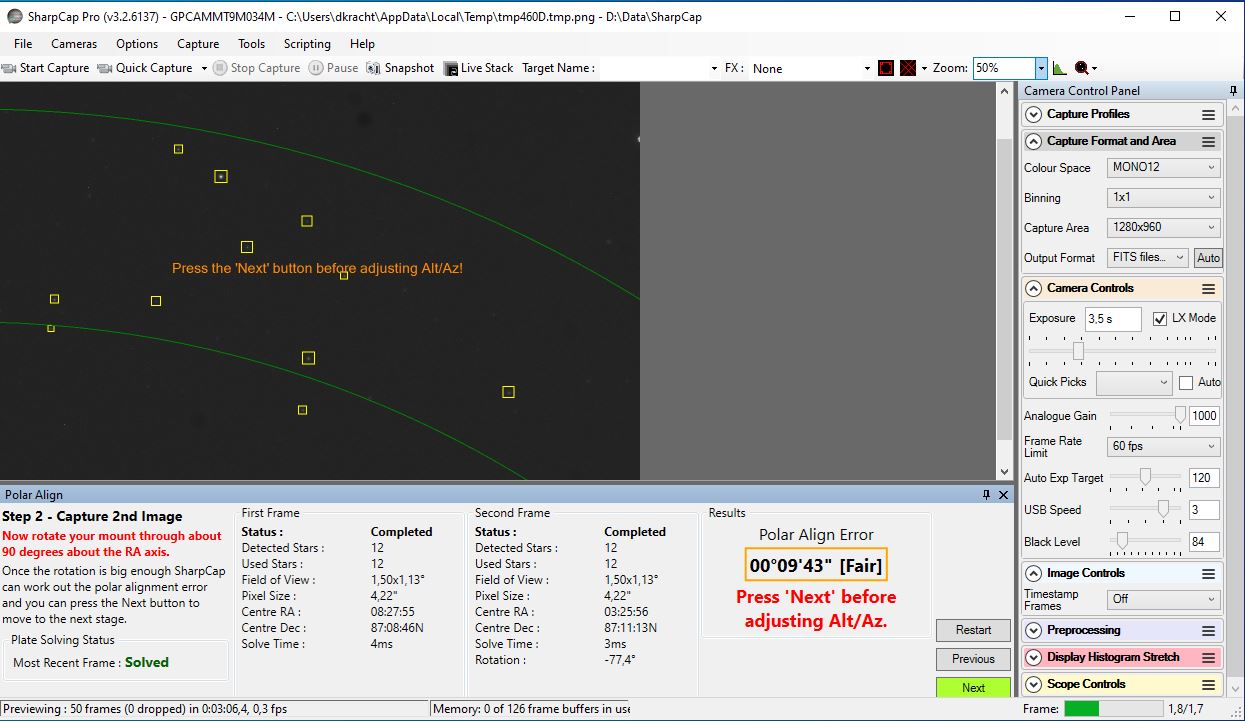
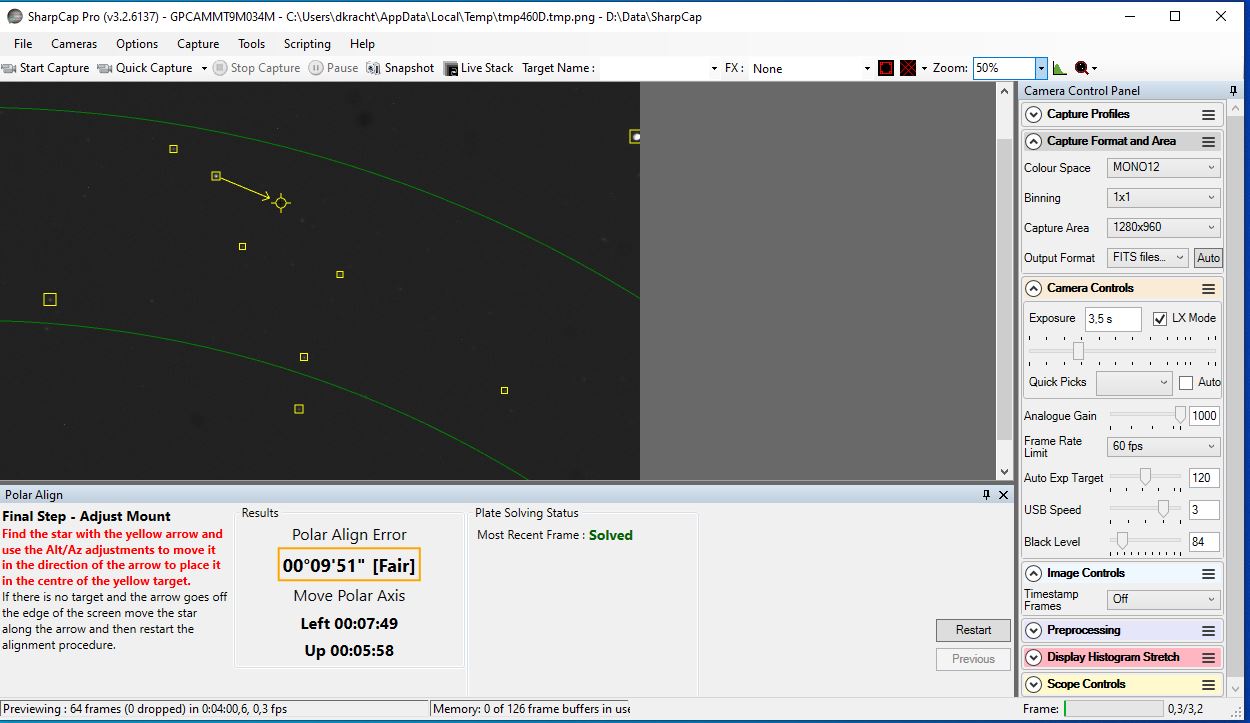
Schritt 6: Pol-Ausrichtung durch Drehen an den Azimut- und Polhöhen-Schrauben
Jetzt müssen wir die Montierung durch Drehen an den “Schräubchen” für Azimut und Polhöhe (Altitude) so einstellen, dass die Drehachse der Montierung (die Stundenachse) parallel zu Erdachse ausgerichtet ist.
Dabei hilft SharpCap mit einer Darstellung auf dem Bildschirm wo ein Stern mit einem gelben Pfeil gezeigt wird, der durch das Drehen an den “Schräubchen” der Montierung in das Zielkästchen auf dem Bildschirm gebracht werden muss.
Diese optische Hilfe ist quasi eine Projektion der errechneten erforderlichen Korrektur auf einen Stern im Gesichtsfeld. Wer es lieber in Zahlen hätte, kann sich auch nach den numerisch ausgeworfenen erforderlichen Korrekturen “Move Polar Axis: Left/Up” richten.
SharpCap macht dabei laufend Aufnahmen und berechnet durch Plate Solving die noch bestehende Abweichung vom Himmelspol. Ggf. müssen wir uns in mehreren Schritten der gewünschten Genauigkeit annähern.
Man kann das also nicht “remote” machen, sondern muss physisch an der Montierung stehen und einen guten Blick auf den Computer-Bildschirm haben…
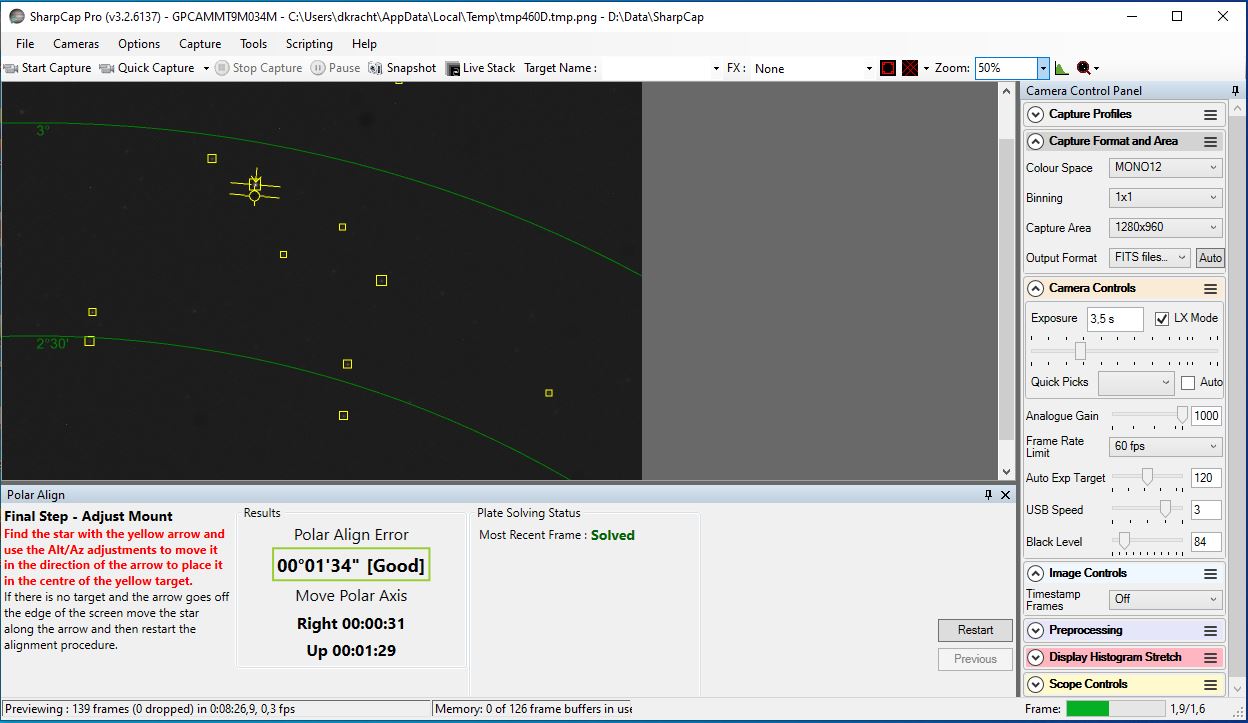
Das schöne ist, dass die Genauigkeit der Polausrichtung (Abweichung vom Himmelspol) exakt ausgeworfen wird; im Beispiel unten schließlich 1 Bogenminute und 34 Bogensekunden, was mir dann bei meiner Montierung HEQ5 Pro reichte.
Wenn die Abweichung unter 2′ ist, wird das als “Good” angesehen, eine Abweichung von weniger als 1′ würde als “Excellent” bewertet.
Abbildung 6: SharpCap Polar Alignment: Fehler noch fast 10 Bogenminuten (pCloud: SharpCap25.jpg)
Abbildung 7: Sharpcap Polar Alignment: Fehler nun weniger als 2 Bogenminuten (pCloud: SharpCap26.jpg)
Das hier betrachtete Qualitätskriterium ist das “Signal-Rausch-Verhältnis” (Signal to Noise Ratio = SNR). Die Qualität von Astro-Fotos wird generell von vielen Faktoren beeinflusst. Darunter sind beispielsweise:
CCD- oder CMOS-Kamera
Farb-Sensor oder Mono-Sensor
Geregelte Kühlung des Sensors (DSLR oder Dedizierte Astro-Kamera oder WebCam oder ?)
Belichtungszeit
Lichtverschmutzung am Beobachtungsort
Fokussierung
Nachführung (z.B. keine, nur Tracking, Autoguiding,…)
Filter
…
Dieser Artikel beschäftigt sich schwerpunktmäßig mit den Belichtungszeiten bei DSO-Aufnahmen und der Frage, wie dafür das Signal-Rausch-Verhältnis verbessert werden kann.
Wie lange sollten die einzelnen Sub-Exposures belichtet werden?
Wir haben ja gelernt, dass wir sehr lange Belichtungszeiten für die so lichtschwachen Objekte (DSOs) der Astrofotografie brauchen.
Lange Belichtungszeit heisst hier aber nicht notwendig, dass ein einzelnes Foto lange belichtet werden muss, sondern wir können auch viele Einzelaufnahmen (Sub Exposures) machen und die dann aufaddieren (Stacken). Es kommt auf die Summe der Einzelbelichtungen an. Man sagt, die gesamte “Integrationszeit” ist das Wesentliche.
Diese Integrationszeit sollte in der Tat lang sein; d.h. mindestens 1 Stunde, besser 2 Stunden, besser 4 Stunden… Die Gesamtzeit (Integrationszeit) kann man ja Planen für die Bobachtungsnacht. Nehmen wir mal an, wir hätten 2 Stunden (also 120 Minuten) angesetzt. Die Frage wäre dann ja, wie lang man jedes Einzelfoto (Sub Exposure) belichten soll. Also ist 120 x 60 sec gut oder 720 x 10 sec oder 24 x 5 min oder… besser?
Quellen
Auf der “Practical Astronomy Show” am 9. März 2019 hat Dr. Robin Glover (SharpCap) dazu einen interessanten Vortrag gehalten. Der Titel des Vortrags war “Deep Sky CMOS Imaging” und er ist als Youtube-Video verfügbar. Youtube:
Ich versuche in diesem Artikel, den Vortrag von Robin Glover nachzuvollziehen und dann zu sehen, wie ich die Schlussfolgerungen auf meine persönliche Situation anpassen kann/muss. Aus diesem Grund bin ich etwas formaler und detaillierter in den Formeln…
Was ist beeinflussbar?
Wenn vieles als gegeben hingenommen werden muss, wie z.B. der Standort (und damit die Lichtverschmutzung), die Kamera (und damit das Kamera-Rauschen, die Kühlungsmöglichkeiten, die Pixelgröße etc.), die nutzbare Zeit am Abend (und damit die Gesamtbelichtungszeit), die Nachführung (keine, Tracking, Guiding,…), dann bleibt als Einflussmöglichkeit im wesentlichen die Entscheidung für die Belichtungszeit der Einzelfotos (Sub Exposures), die zum Gesamtbild zusammengeführt werden sollen (“Stacking”).
Wir gehen die Thematik in folgenden Schritten an
Grundlagen der digitalen Astrofotografie
Was beeinflusst die Qualität von Einzelfotos (Sub Exposures) ?
Wie ergibt sich die Qualität des Summenfotos (gestacktes Bild) ?
Welche Schlussfolgerungen/Empfehlungen ergeben sich daraus für den “Standard Observer”?
Welche Schlussfolgerungen/Empfehlungen ergeben sich daraus für meine persönlich präferierten Beobachtungsorte?
Grundlagen: Signal und Rauschen
Der digitale Sensor – schematisch
Abbildung 1: Elektronische Bauelemente für digitales Fotografieren (pCloud: dslr.svg)
Signalstärke
Auf einem Astrofoto kommen verschiedene Signale zusammen:
Ein Signal vom eigentlichen Beobachtungsobjekt (Nutz-Signal)
Ein zusätzliches Signal vom Himmelshintergrund (Light Pollution)
Ein zusätzliches Signal durch den Dunkelstrom (abhängig von der Sensor-Temperatur)
Die Signalstärke ist eigentlich: Anzahl Photonen pro Pixel pro Sekunde. Das menschliche Auge speichert die Lichtteilchen nicht, der Helligkeitseindruck (die physiologische Signalstärke) wird durch die Anzahl Lichtteilchen pro Zeiteinheit bestimmt. Das Auge hat dabei eine quasi konstante “Belichtungszeit” von so etwa 1/18 Sekunde.
Der Sensor in unserer Kamera hat im Gegensatz zum menschlichen Auge ein beträchtliches Speichervermögen. Daher ist die Belichtungszeit relevant. Die Photonen schlagen Elektronen aus dem Sensormaterial heraus und diese werden über die Belichtungszeit gesammelt. Die gesammelten Elektronen werden dann gemessen und von einem Analog to Digital Converter (ADC) in eine Zahl umgewandelt (ADU). Die Quantum Efficiency (QE) ist dabei der Prozentsatz von Photonen, der ein Elektron auslöst.
Die Signalstärke im Sensor ergibt sich aus der Signalrate und der Belichtungszeit. Wenn wir die Signalrate messen in Anzahl Elektronen pro Pixel pro Sekunde (e-/Pixel/s), ergibt sich die Signalstärke als:
Signalstärke = Signalrate * Belichtungszeit
Jedes Signal ist mit einem Rauschen behaftet. Die Signale vom Himmelshintergrund und vom Dunkelstrom können wir abziehen; es bleibt das Rauschen von Himmelshintergrund und Dunkelstrom; diese können wir durch Stacking der Light-Frames und Dark-Frames (s.u.) bekämpfen.
Messen von Signal und Rauschen
Ein mit einem digitalen Sensor gemachtes Bild besteht aus vielen Pixeln und jeder Pixel hat einen Helligkeitswert (ADU), den der ADC für das jeweilige Pixel ausgegeben hat.
Als Signal kann man nun den Mittelwert und als Rauschen die Standardabweichung dieser ADU-Werte nehmen. Dies können wir z.B. mit der Software Fitswork folgendermassen messen:
Wir öffnen das betreffende Foto in Fitswork
Wir markieren den zu messenden Bereich durch ziehen mit der rechten Maustaste (bzw. wir messen das ganze Bild)
Rechtsklick öffnet ein Kontextmenü, wo wir “Statistik für den Bereich” auswählen…
In der Astrofotografie definiert man nun das Signal to Noise Ratio (SNR) einfach als:
Es gibt mehrere Beiträge für Rauschen in den Light-Frames (Einzelfotos, Sub Exposures), die sich pro Einzelfoto in bestimmter Art addieren (s. unten):
Kamera-extern hat man
Rauschen im eigentlichen, externen Signal vom Beobachtungsobjekt das sog. Shot Noise (auch Photonenrauschen oder Schrotrauschen genannt)
Rauschen im Signal des Himmelshintergrunds (Lichtverschmutzung etc.)
Kamera-intern hat man (sog. Kamera-Rauschen):
Rauschen durch den Auslese-Vorgang (sog. Read Noise – nur Rauschen, kein Signal)
Rauschen durch Wärme im Sensor (sog. Thermisches Rauschen, also Rauschen im Dunkelstrom-Signal, deshalb auch Dunkelstrom-Rauschen genannt)
Quantisierungsrauschen durch den ADC (dieses ist so gering. dass wir es in dieser Betrachtung komplett ignorieren)
Rauschen bringt feine Details im Bild zum Verschwinden. Deshalb wollen wir das Rauschen insgesamt reduzieren.
Das Rauschen ist meistens zufällig (stochastisch) und kann also dadurch bekämpft werden, dass man viele Aufnahmen macht und die dann mittelt (siehe: Stacken).
Ausser in den Einzelfotos (Light Frames) hat man auch noch Rauschen:
Rauschen in den Dark-Frames
Rauschen in den Flat-Frames
Dieses betrachten wir zunächst ebenfalls nicht.
Zusammenfassung (Executive Summary)
Da die technischen Zusammenhänge doch sehr komplex und vielschichtig sind, hier die “wichtigsten” Erkenntnisse vorweg (für einen gegebenen Standort mit gegebener Lichtverschmutzung):
Die Gesamtbelichtungszeit (Integrationszeit) muss lang sein (z.B. 2 Stunden oder mehr)
Die Belichtungszeit eines Einzelfotos muss immer so gewählt werden, dass im Histogramm weder links noch rechts etwas abgeschnitten (“geclippt”) wird
Die Einzelbelichtungszeit muss nur so groß sein, dass das Einzelbild “hintergrundlimitiert” ist; d.h.
Unter lichtverschmutztem Himmel die Einzelfotos (Subs) kurz belichten (z.B. 30 sec), dann aber ganz viele machen (und man braucht vielleicht gar kein Autoguiding)
Unter dunklerem Himmel können die Einzelfotos schon länger belichtet werden (z.B. 5 min), wenn das Guiding (oder: Autoguiding) das hergibt
Ruhig ISO bzw. Gain hochdrehen, dann wird das Ausleserauschen geringer (bei CMOS Sensoren) – aber der Dynamik-Umfang wird etwas sinken
Das thermische Rauschen ist häufig viel kleiner als Stör-Signale aus anderen Quellen. Deshalb ist extreme Kühlung manchmal garnicht so wichtig.
Folgende Rausch-Anteile werden wir im Folgenden ignorieren:
Das thermische Rauschen im Light-Frame: Durch ausreichende Kühlung des Sensors werden wir es auf 10% der Lichtverschmutzung begrenzen
Das Dunkelstrom-Rauschen im Dark-Frame: Wird reduziert durch das Stacken vieler Dark-Frames zu einem Masterdark
Die verbleibenden Rauschanteile wollen wir durch geeignete Wahl der Belichtungszeiten soweit reduzieren, dass sie unterhalb einer persönlichen Qualitätsgrenze liegen. Dabei werden wir die Größe der Lichtverschmutzung als Massstab nehmen.
Das Ausleserauschen (Read Noise) wird irrelevant, wenn wir die Subs so lange belichten, das sie quasi “hintergrundlimitiert” werden; soll heissen dass im gestackten Bild das Ausleserauschen maximal 5% der Lichtverschmutzung ausmacht.
Das “Shot Noise” (Photonen-Rauschen) wird reduziert durch das Stacken vieler Light-Frames
Mit “Hintergrund” meint man die Himmelshelligkeit (Lichtverschmutzung, Airglow etc.). Unter “limitiert” durch den Hintergrund meint man, dass man nicht länger belichten sollte da bei längerer Belichtung die Lichtverschmutzung dominieren würde. Bleibt man knapp unter dieser Grenze so sind die anderen Rausch-Signale (Auslese-Rauschen und thermisches Rauschen) deutlich kleiner sind als das Signal vom Himmelshintergrund und sie können damit vernachlässigt werden. Effektiv ergibt also der Himmelshintergrund das Limit für die Belichtungszeit.
Wenn man sich nach der “optimalen” Belichtungszeit für die Subs fragt, reicht es, wenn man gerade so lange belichtet, dass die Subs hintergrundlimitiert sind. Dann wird durch noch längere Belichtungszeiten das Signal-Rausch-Verhältnis im Stack (Summenbild) nicht mehr verbessert.
Signalkomponenten im Einzelfoto
Wir haben folgende Signalkomponeten in jedem Einzelfoto (Sub Exposure):
Signal vom eigentlichen Himmelsobjekt (ObjektSignal)
Signal vom Himmelshintergrund (LightPollutionSignal)
Signal vom Dunkelstrom
Wie addieren sich die Signalkomponenten im Einzelfoto?
Unahhängige Signale, die über die Zeit prinzipiell gleich bleiben, addieren sich “normal”.
\((1) \hspace{1 em} S_{1+2} = S_1 + S_2 \)
Addieren wir alle Signale, die wir in unserem Einzelfotos haben kommen wir zu einem Gesamtsignal (ImageSignal) von:
Das Himmelsobjekt, welches wir fotografieren, sendet einen Strom von Photonen, die über unsere Optik auf den Pixeln des Kamera-Sensors landen und dort als Elektronen über die Dauer unserer Belichtungszeit gesammelt werden. Durch die Ausleseelektronik der Kamera erhalten wir dann pro Pixel einen Zahlenwert für die Helligkeit.
Je nach anvisiertem Objekt kann die “ObjektSignalRate” ganz unterschiedlich sein. Beispiel: Wieviel Photonen fallen vom Andromedanebel pro Sekunde auf ein Pixel meiner Kamera? Vermutlich könnte man aus der Flächenhelligkeit eines Objekts diese “ObjektSignalRate” ermitteln – ähnlich wie im nächsten Abschnitt mit der Lichtverschmutzung…
Signal vom Himmelshintergrund
Die Helligkeit des Himmelshintergrunds hängt von der Lichtverschmutzung am Beobachtungsort ab. Hinzu kämen der Mond, möglicherweise Airglow u.a.
Die Signalrate, gemessen in Anzahl Elektronen per Pixel per Sekunde, hängt zusätzlich von der Optik (Öffnungsverhältnis) und dem Sensor (Mono/Colour, Pixelgröße, Quanteneffizienz) ab.
Wir definieren deshalb einen “Standard-Beobachter” (mit Standard Equipment), um zu vergleichbaren Zahlen zu kommen.
Der Standard-Beobacher sei definiert durch:
Sensor: CMOS, monochrom, 50% QE, Pixelgröße 3,75µ, Temperatur 25 Grad Celsius
Öffnungsverhältnis: f/6
Lichtverschmutzung: Bortle 5
Gesamtbelichtungszeit: 60 Minuten
Die “LightPollutionRate” können wir mit dem “Sky Background Calculator” ermitteln. Link: https://tools.sharpcap.co.uk
Der Kniff dabei ist, die Himmelshelligkeit von Magnituden pro Quadratbogensekunde umzurechnen in Candela pro Quadratmeter (cd/m²). Dann haben wir einfache lineare Zusammenhänge. Die Umrechnung in cd/m² habe ich in meinem Blog-Artikel über SI-Einheiten beschrieben.
Tabelle 1: Signalrate aus Lichtverschmutzung in e- / Pixel /Sekunde (am 24.5.2021 der o.g. Website entnommen)
Bortle 9
16.0 mag
Inner City
Bortle 8
18.0 mag
City Sky
Bortle 7
18.3 mag
Urban
Bortle 6
18.8 mag
Bright Suburban
Bortle 5 19.8 mag Suburban
Bortle 4
20.9 mag
Rural/Suburban
Bortle 3
21.4 mag
Rural
Bortle 2
21.6 mag
typical dark
Bortle 1
21.85 mag
Excellent Dark
f/4
175,25
27,78
21,07
13,29
5,29
1,92
1,21
1,01
0,80
f/5
112,16
17,78
13,48
8,51
3,39
1,23
0,78
0,65
0,51
f/6
77,89
12,34
9,36
5,91
2,35
0,85
0,54
0,45
0,36
f/7
57,23
9,07
6,88
4,34
1,73
0,63
0,41
0,33
0,26
f/10
28,04
4,44
3,37
2,13
0,85
0,31
0,19
0,16
0,13
Dies sind Daten für einen Mono-Sensor mit 50% Quantum Efficiency und 3,75μ Pixelgröße (für den sog. Standard-Observer).
Für einen Colour-Sensor sind diese Zahlen durch 3 zu dividieren.
Unser Standard-Observer hat nach Tabelle 1 also eine Lichtverschmutzung von:
\((4) \hspace{1 em} LightPollutionRate = 2.35 \space Elektronen \space pro \space Pixel \space pro \space Sekunde \)
Das am Sensor gemessene Signal steigt mit der Belichtungszeit:
Das Signal, was der Sensor ohne einkommende Photonen macht, – also “im Dunklen” – kann man sich in einem Dark-Frame betrachten. Darauf werden Hot Pixel und evtl. ein Amp Glow zu sehen sein…
Rauschkomponenten im Einzelfoto
Wir haben folgende Rauschkomponeten in jedem Einzelfoto (Sub Exposure):
Rauschen im Dunkelstrom (ThermalNoise)
Ausleserauschen (ReadNoise)
Schrot-Rauschen (ShotNoise)
Rauschen in der Lichtverschmutzung (SkyNoise)
Wie addieren sich Rauschkomponenten im Einzelfoto?
Unahhängige Rausch-Signale, die sich über die Zeit zufällig (stochastisch) verhalten, addieren sich mit einer “Quadratwurzel” …. R1 + R2 = Wurzel aus (R1 Quadrat + R2 Quadrat)
Wenn wir zwei zufällige und unabhängige Rauschsignale R1=4 und R2=3 addieren, so erhalten wir R1 + R2 = 5
Das bedeutet, dass bei der Addition stark unterschiedlicher Rauschsignale man das schwächere “praktisch” vernachlässigen kann. Z.B. mit R1 = 10 und R2 =1 ergibt sich:
Wir werden sehen, dass wir (unter bestimmten Bedingungen) das Thermische rauschen und das SkyNoise vernachlässigen können.
Thermal Noise (Dunkelstrom-Rauschen)
Im Sensor entstehen Elektronen nicht nur durch die ankommenden Photonen, sondern auch durch Wärme in der Kamera. Das nennt man “Dunkelstrom”. Dieser Dunkelstrom macht ein Dunkelstrom-Signal und ein Dunkelstrom-Rauschen (Thermal Noise). Das Dunkelstrom-Signal kann man durch Dark-Frames vom vom Nutzsignal (Light Frame) abziehen; das Dunkelstrom-Rauschen bleibt aber erhalten. Es ist von der Temperatur und der Dauer der Belichtung abhängig.
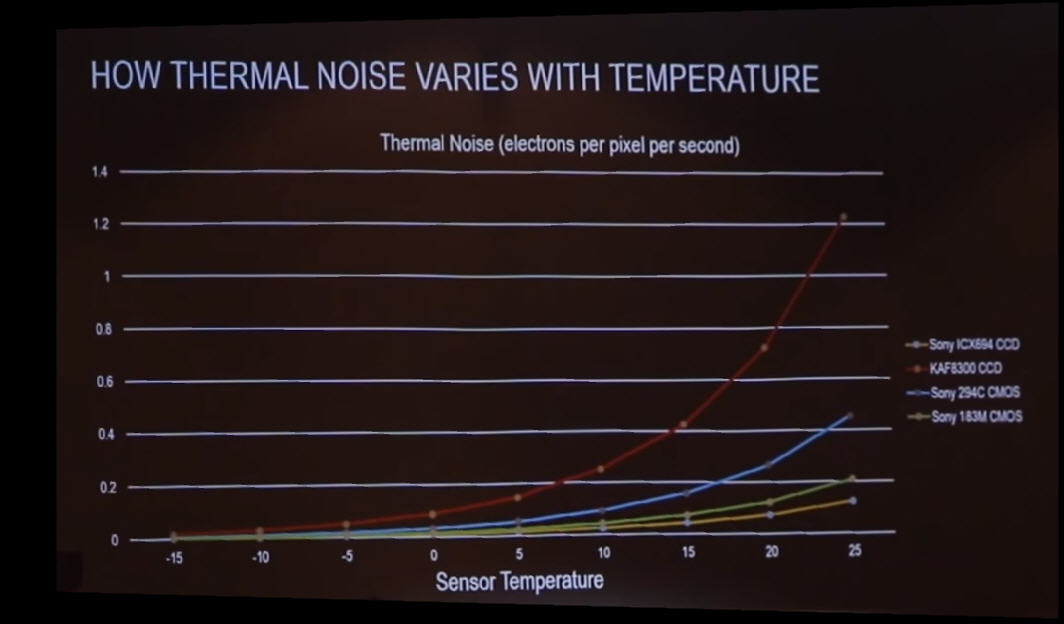
Dunkelstrom-Rauschen (Thermal Noise) verdoppelt sich ungefähr bei Temperaturerhöhung um 6,5 Grad Celsius.
Je nach Sensor ergeben sich unterschiedliche Kurven für dieses Thermal Noise (Copyright Dr. Robin Glover):
Abbildung 2: Dunkelstrom-Rauschen bei verschiedenen Temperaturen (pCloud: RobinGlover-01.jpg)
Typisch für moderne CMOS-Sensoren wie Sony 294C sind 0,2 Elektronen pro Sekunde pro Pixel bei einer Sensor-Temperatur von 25 Grad Celsius. Wenn man diese Kurven sieht, erkennt man, dass ein Herunterkühlen von 25 Grad auf 15 Grad völlig ausreicht, um das thermische Rauschen bedeutungslos (von 0,2 auf 0,1 e–/sec) zu machen.
Bekämpfung: Das thermische Rauschen bekämpfen wir durch Kühlung des Sensors. Robin Glover empfiehlt, das thermische Rauschen auf 10% des Signals der Lichtverschmutzung zu limitieren. Bei besonders geringer Lichtverschmutzung wäre also eine entsprechende leichte Kühlung notwendig. Welche Signalstärke durch Lichtverschmutzung entsteht, ist unten beschrieben.
Erforderliche Kühlung
Um das “Thermal Noise” (das Dunkelstromrauschen) ignorieren zu könnnen, wollen wir dieses auf 10% der LightPollutionRate limitieren. Dazu müssen wir also wissen, wie stark die “LightPollutionRate” ist. Die Himmelshelligkeit an einen bestimmten Beobachtungsort messen wir mit dem Sky Quality Meter (SQM) in Magnituden pro Quadrat-Bogensekunde. Je nach Teleskop und Sensor ergibt sich daraus die “Light Pollution Rate” (in Elektronen pro Pixel pro Sekunde).
Erforderliche Kühlung beim Standard Observer
Light Pollution Rate = 2,35 e- /Pixel / s
Thermal Noise Limit (10%) = 0,235 e- /Pixel /s
Sensor: IMX294
Erforderliche Sensor Temperatur: 17-18 Grad Celsius
Read Noise (Auslese-Rauschen)
Durch den Vorgang des Auslesen der Pixel-Informationen aus dem Sensor entsteht auch ein zusätzliches Rauschen, das sog. Auslese-Rauschen.
Wenn man statt ein paar wenigen Aufnahmen mit längerer Belichtung alternativ viele Aufnahmen mit kürzerer Belichtung macht, hat man auf jeder Einzelaufnahme das Ausleserauschen und das würde also bei “vielen kurzen Belichtungen” viel stärker ins Gewicht fallen. Allerdings ist das Auslese-Rauschen bei modernen CMOS-Kameras sehr gering, wenn man den Gain etwas hoch stellt, was die Dynamik evtl. herabsetzt.
Read Noise bei unterschiedlichem Gain bzw. ISO
Das Aufdrehen des “Gain” bei CMOS-Sensoren ist einfach eine Verstärkung aller Bildsignale.
Das Ausleserauschen (Read Noise) wird durch den Gain allerdings nicht verstärkt, da diese Verstärkung erst nach der Belichtung des Sensors stattfindet (wo genau entsteht das Ausleserauschen?).
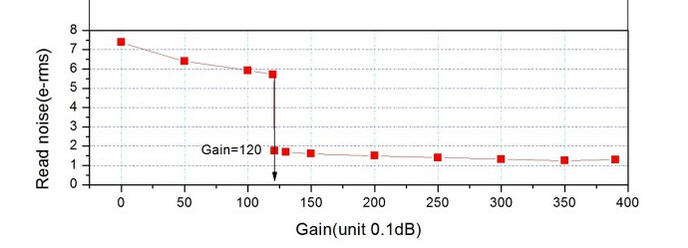
Wichtige Kenngrößen des Sensors (Sony IMX294) sind also:
Ausleserauschen (bekommen wir durch Gain 120 auf unter 2.0 e/pix/sec)
Thermisches Rauschen (bei Kühlung auf -10 Grad praktisch Null)
Quantum Efficiency bei 75%
Abbildung 3: Read Noise in Abhängikeit vom Gain bei der ZWO ASI294MC Pro (pCloud: RobinGlover-02.jpg)
Bekämpfung des Ausleserauschens
Das Auslese-Rauschen können wir bei CMOS-Kameras bekämpfen durch Aufdrehen des Gains bis zu dem Punkt, wo das Ausleserauschen stark abfällt (Gain 120 im obigen Beispiel).
Andererseits ist das Ausleserauschen ja unabhängig von allen anderen Einstellungen und fällt eben genau einmal pro Einzelfoto an. Bei gegebener Gesamtbelichtungszeit sollten wir also mit möglicht wenigen Einzelfotos (Sub Exposures) auskommen. Die Belichtungszeit der Subs also soweit hochdrehen, bis “Hintergrundlimitierung” (s. Lichtverschmutzung unten) erreicht ist.
Schlussfolgerung für das Ausleserauschen
Das Ausleserauschen unseres Sensors pro Einzelbild ist ein unvermeidlicher Einflussfaktor; im Beispiel der ZWO ASI 294MC Pro: R = 1,5 e-/pixel/sec
Shot Noise (Schrotrauschen)
Auch im eigentlichen Nutz-Signal haben wir ja ein Rauschen, das sog. “Shot Noise” (im Deutschen auch “Schrotrauschen” genannt) – benannt nach Walter Schottky (1886-1976). Das Shot Noise haben wir weil die Photonen diskrete Teilchen sind, deren Ankommensrate auf einem Pixel zufällig ist und die man mit einer Poisson-Verteilung beschreiben kann.
Wenn wir länger belichten, kommen mehr Photonen auf den Sensor, wenn wir kürzer belichten, kommen weniger Photonen auf den Sensor. Bei einem schwächeren Signal ist das Shot Noise im Verhältnis zum Signal größer (Poisson-Verteilung). Umgekehrt: je länger wir belichten, desto geringer wird das Shot Noise im Verrhältnis zum Signal.
Shot Noise als Funktion des Signals
Das ShotNoise hängt von der Stärke des ObjektSignals ab, welches seinerseits durch die Helligkeit des Objekts und die Dauer der Belichtung gegeben ist.
Abbildung 4: How Shot Noise varies with Brightness (pCloud: Robin Glover Shot Noise 01.svg)
Shot Noise in Prozent des Signals
Absolut gesehen, steigt das Shot Noise mit der Signalstärke, also der Belichtungszeit.
Aber relativ zum Signal wird das Shot Noise (prozentual) immer geringer:
Abbildung 5: Shot Noise as a Percentage of Brightness (pCloud: Robin Glover Shot Noise 02.svg)
Shot Noise und Lichtverschmutzung
Das Shot Noise lässt die schwächsten (dunkelsten) Stellen im Bild quasi verschwinden. Das dunkelste im Bild ist aber das Signal der Lichtverschmutzung. Wir sollten das Shot Noise also in Relation zum Signal aus Lichtverschmutzung sehen. Unser “Standard Observer” hat (Gleichung (3)) eine Lichtverschmutzung von 2.35 Elektronen pro Pixel pro Sekunde.
In Abhängigkeit von der Belichtungszeit der Einzelaufnahme ergibt sich:
ShotNoise = Wurzel aus Nutzsignal = Wurzel aus (NutzsignalRate * Belichtungszeit) (nach Gleichung (9) und (3))
Das ShotNoise selber hängt ja von der Stärke des Nutzsignals ab. Bei einer Nutzsignal-Rate von 243,36 Elektronen pro Pixel und Sekunde (243,36 = 15,62) kommen wir auf das gleiche Bild wie in Robin Glovers Präsentation.
Abbildung 6: Shot Noise in % der Lichtverschmutzung des Standard Observers (pCloud: Robin Glover Shot Noise 03.svg)
Dieses Bild sagt ja “Einzelbild länger belichten, ergibt weniger Rauschen”. Aber wenn wir das Stacken (s.u.) mit berücksichtigen, wird die Sache etwas anders.
Sky Noise (Rauschen in Lichtverschmutzung)
Das Rauschen in der Lichtverschmutzung ignorieren wir. Wohl aber ist die Stärke des Signals der Lichtverschmutzung ein wichtiger Massstab für die anderen Faktoren.
Summe des Rauschens im Einzelbild
Wenn wir, wie gesagt die Größe des Dunkelstrom-Rauschens (Thermal Noise) und das Rauschen in der Lichtverschmutzung (Sky Noise) vernachlässigen, da sie klein gegenüber den anderen Rauschkomponenten sind, bleibt also das Gesamt-Rauschsignal im Einzelbild, das “SingleFrameImageNoise” als Summe aus ReadNoise und ShotNoise:
Dabei sehen wir den Einfluss des ReadNoise (Ausleserauschen) auf das Gesamtrauschen, nur bei kürzeren Belichtungszeiten. Bei längeren Belichtungszeiten verschwindet der Einfluss des ReadNoise ganz schnell. Um das in der Grafik sichtbar zu machen, müssen wir einen ganz anderen Massstab auf der x-Achse (Belichtungszeit) wählen.
Das ShotNoise ist \( ShotNoise = \sqrt{SignalRate} \cdot \sqrt{t} \)
Um das gleiche Bild wie in Robin Glovers Vortrag zu kommen, nehmen wir: SignalRate = 2 Elektronen per Pixel per Sekunde
Das ReadNoise hängt von der verwendeten Kamera ab. Wir nehmen für unsere Grafik mal ein paar typische Werte an:
typische CCD-Mono-Kamera habe ein Ausleserauschen (ReadNoise) von 7 Elektronen pro Pixel pro Sekunde
typische CMOS-Kamera habe ein Ausleserauschen (ReadNoise) von 2.5 Elektronen pro Pixel pro Sekunde
eine “ideale” Kamera ohne ReadNoise, also Null Elektronen pro Pixed pro Sekunde
Dann ist bei der typischen CCD-Mono-Kamera (R=7) und einer Belichtungszeit von t das Gesamtrauschen im Einzelbild:
Abbildung 7: Single Frame Noise als Prozentsatz vom Signal der Lichtverschmutzung (pCloud: Robin Glover Noise 04.svg)
Stacking
In der Astrofotografie nehmen wir viele kürzer belichtete Fotos eines Objekts auf (sog. Sub Exposures oder Frames) und legen diese dann übereinander sog. Stacking, Dabei addieren sich die Signale in verschiedener Weise.
Signal und Rauschen beim Stacking
Beim Stacken von Einzelaufnahmen (Sub Exposures) verhalten sich Signal und Rauschen unterschiedlich.
Konstante Signale, bei denen sich die Signalstärke von Sub zu Sub eigentlich nicht ändert, addieren sich einfach.
\((12) \hspace{1 em} S = S_1 + S_2 + S_3 + … \)
Rausch-Signale, die sich von Sub zu Sub zufällig (stochastisch) ändern, addieren sich mit der “Quadratwurzel”
Andererseits nimmt bei zunehmendem Stacking (Anzahl Frames) der Speicherplatz für die Fotos auch linear zu. Beispielsweise bekomme ich eine Gesamtbelichtungszeit von 120 Minuten wenn ich 720 Fotos mit 10 Sekunden mache oder auch bei 60 Fotos mit 120 Sekunden; allerdings benötigt man in ersteren Fall 12 Mal so viel Speicher.
Die Schlußfolgerung für den Standard Observer
Wenn wir einfach einen gegebenen Ort, ein gegebenes Astro-Equipment und eine gegebene Zeit haben, was sollen wir machen?
Dafür gibt es eine Formel. Wobei wir folgende Symbole benutzen:
O = Object Signal Rate in Electrons per Sekunde per Pixel (abhängig von der Objekt-Helligkeit)
R = Read Noise (typisch bei CMOS-Sensoren: 0,2 e pro Pixel)
T = Total Imaging Time
s = Sub Exposure Time
n = Number of Subs \( n = \frac{T}{s} \)
P = Light Pollution Rate in Electrons per Sekunde per Pixel (typisch: 2,6 für unseren Standard Observer mit Bortle=5)
Noise im Single Frame
Wir wollen die Stärke des Rauschens im Einzelfoto ermitteln. Dafür gilt (Thermal Noise durch geeignete Kühlung vernachlässigt, SkyNoise vernachlässigt weil ganz gering):
Wenn wir als Objekt einfach mal ein sehr dunkles Objekt nehmen, was eine ObjectSignalRate (O) hat, die genauso groß ist, wie die Rate der Lichtverschmutzung (P), dann ergibt sich:
Wenn wir als Objekt einfach mal ein sehr dunkles Objekt nehmen, was eine ObjectSignalRate (O) hat, die genauso groß ist, wie die Rate der Lichtverschmutzung (P), dann ergibt sich:
Wenn wir diese “trockene” Formel mal als Grafik darstellen, sehen wir besser, was da eigentlich passiert. Wir gehen von einer Gesamtbelichtungszeit von einer Stunde (3600 Sekunden) aus nehmen unseren “Standard Observer” und stellen dann die Werte für zwei Kameratypen (typische CCD mit 7.0 e Ausleserauschen und eine typische CMOS mit 2.5 e Ausleserauschen) dar:
Abbildung 8: Total Stack Noise in Abhängigkeit von der Einzel-Belichtungszeit (pCloud: Robin Glover Noise 05.svg)
Beim gesamten Störsignal (Rauschen) betrachten wir ja nur noch zwei Anteile: Ausleserauschen und Lichtverschmutzung.
Die Lichtverschmutzung hat an unserem Beobachtungsort eine gegebene konstante Rate. Die Lichtverschmutzung nimmt auf unseren Bildern also propotional der Belichtungszeit zu – dagegen können wir nichts machen.
Das Ausleserauschen haben wir einmal pro Einzelfoto. Also im Idealfall nur genau einmal. Wenn wir die Gesamtbelichtungszeit in mehrere Einzelfotos (Sub Exposures) aufteilen, haben wir das Ausleserauschen addiert für jedes Einzelfoto. Solange das Ausleserauschen sehr klein gegenüber er Lichtverschmutzung ist, können wir es (fast) vernachlässigen. Wenn wir zu sehr vielen Einzelfotos (d.h. sehr kurzen Belichtungszeiten) kommen wird irgendwann das Ausleserauschen relevant werden und schließlich auch deutlich mehr als die Lichtverschmutzung werden.
Wir sehen, dass sich das Total Stack Noise bei gegebener Gesamtbelichtungszeit (hier: 3600 Sekunden) jeweils einem Optimum (Minimum) annähert (im Beispiel: 96,8 bei CMOS und 97,0 bei CCD).
Die Kurven flachen sehr schnell ab, also können wir durchaus mit Sub Exposures arbeiten, die wesentlich kürzer sind und dabei das optimale (minimale) Rauschen nur ganz knapp erhöhen.
Das Minimum-Rauschen ist also für unseren Standard Observer (P=2.6) bei einer Stunde Gesamtbelichtungszeit:
Für unsere typische CMOS-Kameramit R=2.5 ergibt das:
Minimum-Rauschen CMOS = 96.8 e-/Pixel/s
Für unsere typische CCD-Kamera mit R=7 ergibt das:
Minimum-Rauschen CCD = 97.0 e-/Pixel/s
Wenn wir etwa ein 5% höheres Rauschen als das Minimum-Rauschen akzeptieren, landen wir bei Sub Exposures von: einer halben Minute bei CMOS und 3 Minuten bei CCD.
Im Beispiel sind das:
Standard-Beobachter CMOS 23 sec
Standard-Beobachter CCD 174 sec
Als tabellarische Darstellung haben wir:
Tabelle 3: Ergebnisse: Total Noise in the Stack Bortle=5
Die Idee ist nun, das Rauschen bei einer bestimmten (kürzeren) Belichtungszeit “s” in Relation zum erzielbaren Minimum (also ein lang belichtetes Foto) zu setzten.
Wenn man also einen bestimmten Prozentsatz zusätzlichen Rauschens im Bild akzeptieren will, kann man in der obigen Tabelle 3 für den “Standard Observer” ablesen, welche Einzelbelichtungszeiten dann im Minimum einzuhalten sind (damit das Ausleserauschen nicht zu groß wird). Beispielsweise bei 5% akzeptiertem Zusatzrauschen (also insgesamt 105%, entsprechend 1,05) hat man Einzelbelichtungszeiten von 23 bzw. 174 Sekunden.
Wir können das auch ausrechnen, indem wir unsere Formel nach s (Einzelbelichtungszeit) auflösen:
Der Physiker in mir sagt, R (das Ausleserauschen) ist sehr klein. dann ist R2 erst recht klein und kann gegenüber 3600 * P ganz vernachlässigt werden. Wir können danach auch die 3600 herauskürzen und erhalten:
\( s = \frac{R^2}{(TotalStackNoisePercent)^2 \cdot P – P} \)
Wenn wir jetzt das TotalStackNoisePercent als “E” schreiben und P unten ausklammern, erhalten wir:
\( (28) \hspace{1 em} \Large s = \frac{1}{E^2 -1} \frac{R^2}{P}\)
Wenn wir 5% zusätzliches Rauschen akzeptieren, also E = 1,05 dann ist der Vorfaktor:
\( \frac{1}{1,05^2 – 1} = 9,7561 \)
Bei E=5% erhalten wir die Formel:
\((29) \hspace{1 em} S = 10 \cdot \frac{R^2}{P} \)
Schlussfolgerungen für meine präferierten Beobachtungsorte
Meine präferierten Beobachtungsorte
An verschiedenen Orten haben wir ganz unterschiedliche Lichtverschmutzung:
Teleskop ED80/600 mit Reducer – Öffnungsverhältnis: f/6.4
Teleskop: APM APO 107/700 mit Reducer 0,75 – Öffnungsverhältnis: f/4,9
Meine Light Pollution Raten
An meinen Beobachtungsorten ist die Lichtverschmutzung (in SQM) anders als beim angenommenen “Standard Observer” Bortle 5 (SQM=19,8 mag).
Auch habe ich andere Teleskope und andere Kameras bei mir zur Verfügung.
In der Spalte “Imager (QE)” haben wir die Quanten-Effizienz des Sensors angegeben (41% gilt für die unmodifizierte Cannon EOS 600D)
Die Spalte “Light Pollution Signal” wurde berechnet mit dem “Sky Background Calculator”: Link: https://tools.sharpcap.co.uk
Wie sich das Thermische Rauschen durch Kühlung reduziert, ist für jeden Sensor anders.
Die Spalte “Erforderliche Sensor Temperatur” ergibt sich aus Abbildung 2 (s.o.) für den Sensor Sony IMX294.
Mein Ausleserauschen
Das Ausleserauschen unseres Sensors pro Einzelbild ist ein unvermeidlicher Einflussfaktor; im Beispiel der ZWO ASI 294MC Pro: R = 1,5 e-/pixel/sec
Zusammenfassung: Optimale Sub Exposures an meinen Standorten
Bei einer 60 Minuten Gesamtbelichtung habe ich ein den unterschiedlichen Standorten unterschiedliche “optimale” Belichtungszeiten für die Einzelaufname (Sub Exposure),wenn man einen persönlichen Qualitätsanspruch von 5% Zusatz-Rauschen ansetzt.
Tabelle 6: Optimale Einzel-Belichtungszeit
Standort
Lichtverschmutzung SQM [mag/arcsec²]
Teleskop
Kamera
Light Pollution Rate [e-/pixel/s]
Kühlung
Einzel-Belichtungszeit [s]
Eimsbüttel
18,0
f/6,375
ZWO ASI294MC Pro
8,31
+25°
3
Handeloh
21,1
f/6,375
ZWO ASI294MC Pro
0,48
-15°
45
Namibia
21,9
f/4,9
ZWO ASI294MC Pro
0,39
-15°
55
Einzelberechnungen: Optimale Sub Exposures an meinen Standorten
Im Einzelen gehen die hier aufgeführten “optiomalen” Einzel-Belichtungszeiten aus den Tabellen x-y hervor.
Optimale Belichtungszeit in Eimsbüttel (SQM 18,0, P=8,27)
Tabelle 7: Ergebnisse: Total Noise in the Stack in Eimsbüttel
Sub Exposure Length
Total Stack Noise ASI294 MC Pro
Total Stack Noise ASI294MC Pro
[s]
e-/pixel/s
[%]
1
194,6
112,8
2
183,9
106,6
2,64
181,2
105,0
5
177,2
102,7
10
174,9
101,3
20
173,7
100,7
30
173,3
100,4
100
172,9
100,1
300
172,6
100,0
1000
172,6
100,0
3600
172,55
100,0
Mit folgenden Annahmen:
T = 3600 Sekunden
P = 8.27 e-/pixel/s
R = 1,5 e-/pixel/s (ASI294MC Pro, Gain=121)
Optimale Belichtungszeit in Handeloh (SQM 21,1 P=0,48)
Tabelle 8: Ergebnisse: Total Noise in the Stack in Handeloh
Sub Exposure Length
Total Stack Noise ASI294MC Pro
Total Stack Noise ASI294MC Pro
[s]
e-/pixel/s
[%]
1
99,1
238,3
2
76,0
182,7
5
57,9
139,1
10
50,4
121,1
30
44,7
107,5
45
43,7
105,0
60
43,2
103,8
120
42,4
101,9
300
41,9
100,7
1200
41,7
100,1
3600
41,60
100,0
Mit folgenden Annahmen:
T = 3600 Sekunden
P = 0.48 e-/pixel/s
R = 1,5 e-/pixel/s (ASI294MC Pro, Gain=121)
Optimale Belichtungszeit in Kiripotib (SQM 21,9 P=0,39)
Tabelle 9: Ergebnisse: Total Noise in the Stack in Kiripotib
Diese Software für die Astrofotografie kann unterschiedliche Kameratypen unterstützen: DSLR, Astro-Kameras etc.
Der Entwickler von SharpCap ist Dr. Robin Glover.
Die primäre Funktion von SharpCap ist sicherlich das Fotografieren von astronomischen Objekten. Ausserdem ist eine gute Life-View-Funktion vorhanden, die ich gerne zum Fokussieren verwende. SharpCap hat sich aber stets weiter entwickelt und unterstützt nun (im Jahre 2020) die Astrofotografie in großem Umfang:
Ab der Version 3.2 wird als Kamera “Folder Watch” unterstützt.
Ab der Version 4.0 (14.06.2021) gibt es eine “Sequencer” Funktion
Version 4.0.9478 (28.11.2022)
Version 4.0.9571.0 (27.09.2013)
Die Pro-Version kostet Euro 12,– pro Jahr
Um das kostenlose SharpCap auf SharpCap Pro “aufzurüsten” muss man einen Lizenzschlüssel, den man nach der Bezahlung per E-Mail bekommt in SharpCap unter “Help -> SharpCap Pro License” eingeben. Zur Kontrolle, ob ein SharCap tatsächlich ein “Pro” ist, kann man sich den installierten Pro-Lizenzschlüssel wieder unter “Help -> SharpCap pro License” anzeigen lassen oder man sieht es auf im Titelbalken von SharpCap, wo dann “SharpCap Pro” angezeigt wird.
Astrofotografie mit SharpCap
Um Astrofotografie mit meinen Astro-Kameras ZWO ASI294MC Pro und Altair GPCAM zu betreiben, benötige ich eine Software auf meinem Windows-Computer, die mit der Kamera alle Funktionen (s.u.) durchführen kann.
Betrachtung des Bildes in Echtzeit (“Life View”) – z.B. zum Fokussieren
Einstellen von Belichtungszeit, Gain/ISO etc.
Aufnehmen von Einzelfotos (“image acquisition”, “capture”, “still images”)
Aufnehmen von Videos
Programmieren von Foto-Serien (“sequencing”)
…
Zur Astrofotografie gibt es verschiedene Windows-Software:
Mit “unterstützt” ist gemeint, dass einer dieser drei PlateSolver zwingende Voraussetzung für das PlateSolving bei SharpCap ist.
Was wird zum PlateSolving mit SharpCap gebraucht?
Zum PlateSolving benutzt SharpCap immer eine lokale Version von astronomy.net (also AnSvr, sei es über All Sky Plate Solver oder anders). Dort muss dann auch Brennweite etc. eingestellt werden und die Index-Files für das Field of View (FoV) geuntergeladen werden. Sonst kann SharpCap auch nicht PlateSolven.
Einstellungen für Platesolving: mit GuideScope50 und GPCAM
Brennweite f=180 mm
Pixel size: 3,75 μ
Chip Array: 1280 x 960 Pixel
Einstellungen für Platesolving mit QHY Polemaster
Brennweite f=25 mm
Pixel size: 3,75 μ
Chip Array: 1280 x 960
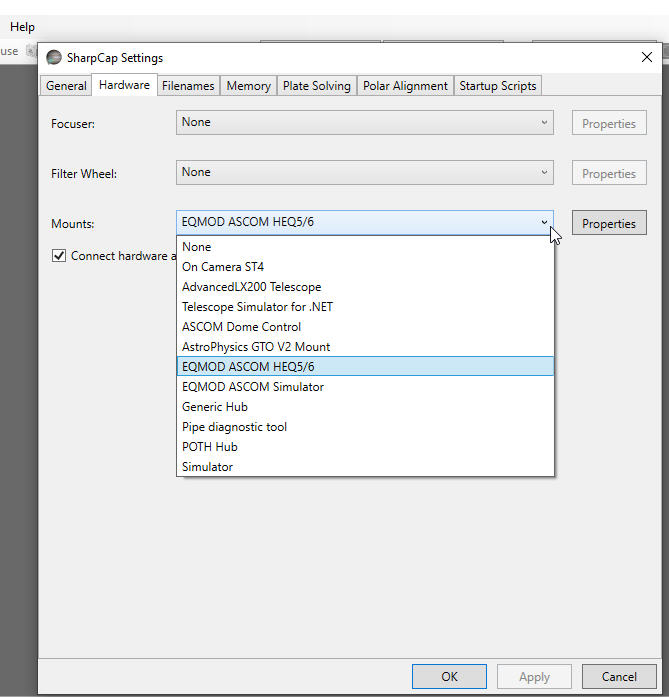
Lustigerweise funktioniert das PlateSolving bei SharpCap nur, wenn auch eine ASCOM-Montierung verbunden ist, denn nach erfolgreichem PlateSolving will SharpCap zwangsweise auch sofort ein SYNC mit der Montierung durchführen und am liebsten noch ein “re-center target”.
PlateSolving funktioniert bei SharpCap ja nur in Verbindung mit einer Montierung / einem Teleskop (siehe oben: After Solving from Telescop Controls…).
Deshalb müssen wir unter dem Reiter “Hardware” immer auch eine Montierung auswählen – wenn wir gerade keine dran haben, also: “EQMOD ASCOM Simulator”.
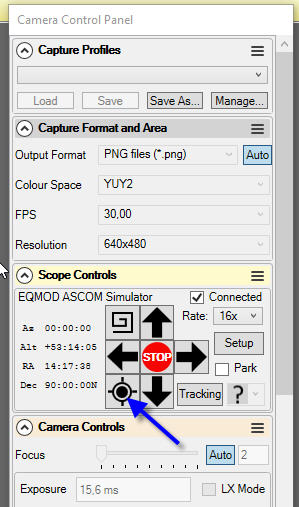
In SharpCap gibt es zwei Möglichkeiten, PlateSolving zu starten:
Über die Menü-Leiste am oberen Fensterrand
Über das Panel “Scope Controls” in der rechten Spalte
Im Panel “Scope Controls” befindet sich rechts von der Deklinationsangabe eine Schaltfläche “Plate Solve and Sync” (Symbol: Zielscheibe mit dickem Mittelkreis).
Voraussetzung, damit das rechte Panel (das “Camera Control Panel) überhaupt aktiv ist, ist eine Verbindung zu einer Camera (Menü -> Cameras ->…).
Abbildung 3: SharpCap-Menüleiste – Camera Control Panel – Scope Controls (pCloud: SharpCap_PlateSolving_03.jpg)
SharpCap Scope Controls
Polar Alignment with SharpCap
Polar Alignment is a new feature in SharpCap 2.9. The idea was inspired by the PhotoPolarAlign application created by Themos Tsikas. Themos has been kind enough to help with testing and suggestions during the development of the polar alignment feature in SharpCap.
Polar Alignment mit SharpCap konnte ich im Dezember 2019 selbst ausprobieren und habe Einzelheiten dazu als separaten Beitrag gepostet.
Sensor Analysis & Smart Histogram
Link:
SharpCap kann dabei helfen, die besten Einstellungen (Belichtungszeit, Gain,…) für Einzelaufnahmen (Subexposures) zu ermitteln.
Diese Funktion heist “Smart Histogram“.
“Smart Histogram” kann nur benutzt werden, wenn vorher mit SharpCap eine sog. “Sensor Analysis” durgeführt wurde.
Die Sensor-Analysis kann man am Schreibtisch durchführen und läuft wie folgt ab:
1. “Flat”: Measuring e/ADU
Kamera-Objektiv auf gleichmäßig helles Light Panel positionieren z.B. Tablet-Display aber nicht zu hell (ggf. einen Bereich markieren)
Highest bit depth: e.g. Colour Space RAW16
Dabei “skip binning”
2. “Status Dark”: (der Objektivdeckel muss wie bei den “Darks” aufgesetzt werden)
2.1 Measuring Black Levels
2.2 Measuring Dark read noise
3. “Gain”: Measuring relative gains. (Kamera-Objektiv auf eine nicht zu helle Umgebung positionieren)
Dabei werden Aufnahmen mit bis 500 ansteigendem Gain gemacht; die Belichtungszeit geht dabei suksessive zurück (bei mir bis 0,29 ms). Daher darf das Objekt nicht zu hell sein.
Ergebnisse der Sensor-Analysis
Dies sind die Ergebnisse der Sensor-Analysis meiner ZWO ASI294MC Pro:
Tabelle 1: Ergebnisse der Sensor-Analysis meiner ZWO ASI294MC Pro
Gain Value
e/ADU
Read Noise (e)
Full Well (e)
Relative Gain
Rel. Gain (db)
Dynamic Range (Stops)
0
3,87
7,83
63410,70
1,00
0,00
12,98
50
2,88
9,22
47187,65
1,34
2,57
12,32
59
2,59
9,03
42413,90
1,50
3,49
12,20
61
2,55
9,06
41822,68
1,52
3,62
12,17
100
1,64
8,40
26830,66
2,36
7,47
11,64
119
1,33
8,20
21776,67
2,91
9,28
11,38
121
2,74
5,98
44930,03
1,41
2,99
12,88
150
1,96
5,58
32069,81
1,98
5,92
12,49
200
1,12
5,19
18378,45
3,45
10,76
11,79
250
0,63
4,83
10392,46
6,10
15,71
11,07
300
0,36
4,56
5851,92
10,84
20,70
10,33
350
0,20
4,43
3333,81
19,02
25,58
9,56
400
0,12
4,57
1924,82
32,94
30,36
8,72
450
0,07
4,49
1104,75
57,40
35,18
7,94
500
0,04
4,75
654,08
96,95
39,73
7,11
Die erste Spalte “Gain Value” ist die Gain-Zahl, die an der Kamera eingestellt ist. Die anderen Spalten sind Messwerte, die SharpCap ermittelt hat.
An diesen Messwerten sieht man z.B. den sog. Unity Gain bei einem Gain zwischen 200 und 250 – interpoliert also bei einem Gain von 212.
Der Gain ist ist die Signalverstärkung in einer Digitalen Kamera, also aus wieviel hereinkommenden Elektronen wird eine ADU-Einheiten gemacht.
“Unity Gain” ist erreicht, wenn ein Elektron auch genau eine ADU-Einheit erzeugt.
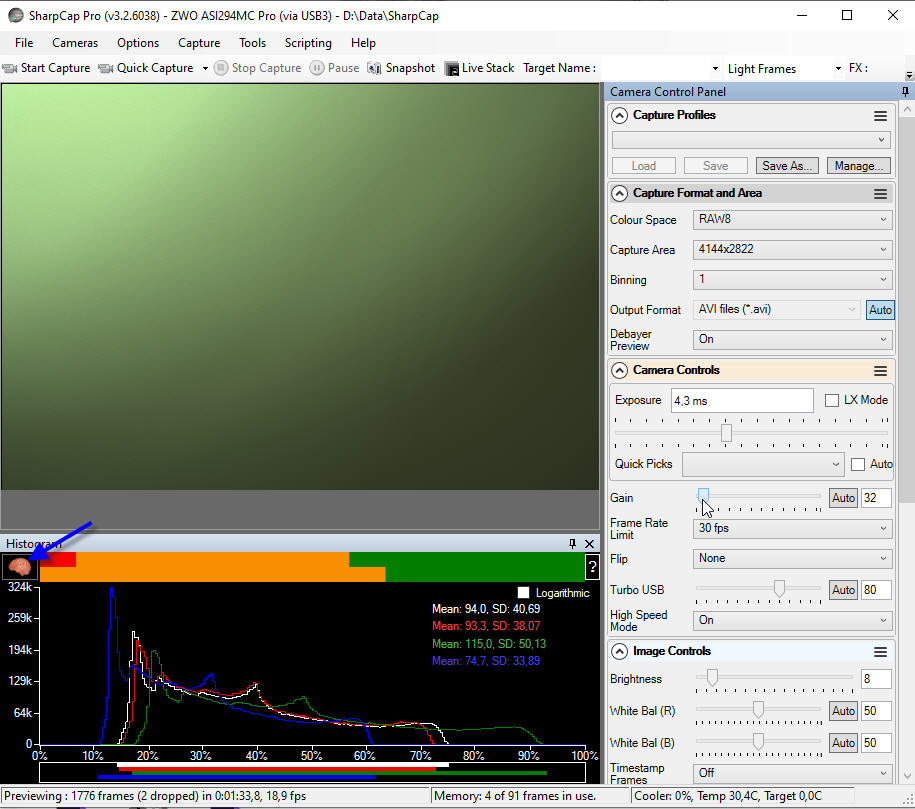
Smart Histogram
Wir öffnen “Menü-Leiste -> Tools -> Histogram”. Beim Histogramm klicken wir links oben auf das Symbol “Gehirn.”
Grundvoraussetzung für diese Funktion ist, eine zuvor durchgeführte “Sensor Analysis”.
Nun sind wir in der Funktion “Smart Histogram”. Das erste, was wir brauchen ist eine Messung der Himmelshelligkeit (in Elektronen pro Pixel pro Sekunde). Dazu richten wir das Teleskop auf eine ganz dunkle Stelle im Himmel und starten die Messung durch Klicken auf die Schaltfläche “Measure“.